V
主页
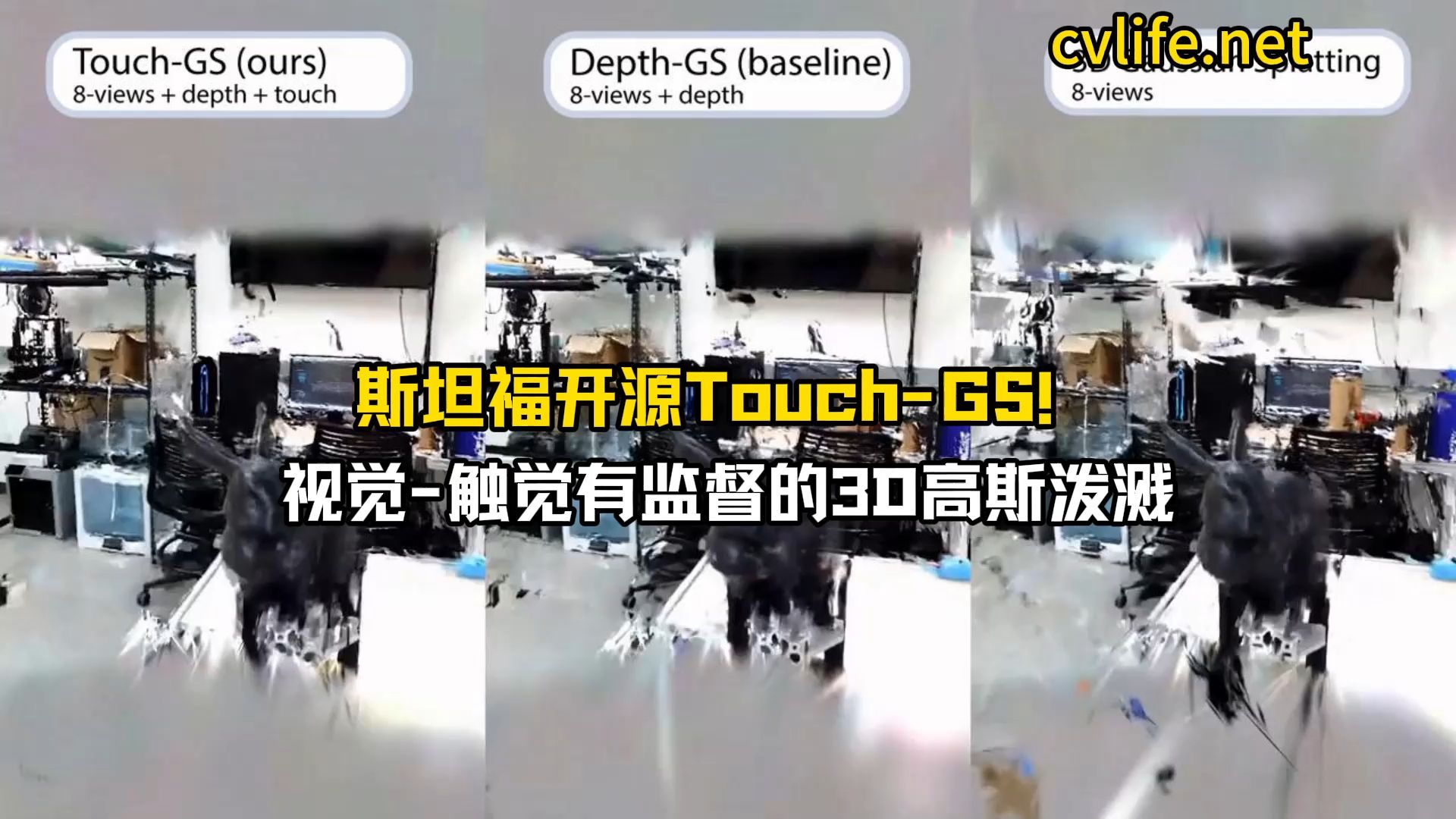
斯坦福开源Touch-GS!视觉-触觉有监督的3D高斯泼溅
发布人
在这项工作中,我们提出了一种新的方法,使用光学触觉传感器来监督3D高斯泼溅( 3DGS )场景。光学触觉传感器在机器人操作和物体表征中的应用越来越广泛;然而,原始的光学触觉传感器数据不适合直接监控3DGS场景。我们的表示利用高斯过程隐式曲面来隐式地表示物体,将许多触觉结合到一个具有不确定性的统一表示中。我们将该模型与单目深度估计网络进行融合,该网络通过两个阶段的过程进行对齐,先与深度相机进行粗对齐,然后进行精细调整以匹配我们的触摸数据。对于每一幅训练图像,我们的方法都会产生相应的融合深度和不确定性图。利用这一额外信息,我们提出了一种新的损失函数- 方差加权深度监督损失,用于训练3DGS场景模型。我们利用DenseTact光学触觉传感器和RealSense RGB - D相机来表明,在稀疏角场景合成中,以这种方式结合触觉和视觉,在不透明物体以及反射和透明物体上的定量和定性结果优于单独的视觉或触觉。 文章名称:【Touch-GS: Visual-Tactile Supervised 3D Gaussian Splatting】 文章链接:http://arxiv.org/abs/2403.09875 项目主页:https://armlabstanford.github.io/touch-gs
打开封面
下载高清视频
观看高清视频
视频下载器
法国团队最新开源!3D高斯溅射可以生成三维网格啦!
清华等联合开源!高保真3D 高斯建模人体化身
自制行星减速机
3d打印 棒子家的K2
[免费开源]3D打印 M32 MGL 模型玩具 初版图纸分享
3D打印弹夹电池收纳盒
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
Switch落灰了?喂食人花!
这就是AI永远替代不了人类的原因2.0
小日子的89小铳抛壳模型
【开源】3D打印高可用性分形台钳
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
我家墙上的Home Assistant控制面板
中科院与华南理工联合发布!NeRF与特征匹配相结合进行位姿估计
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
ETHZ新开源|实时检测复杂环境中的运动物体,Dynablox方法突破性能!
七七-Ultra发布啦!!
DUMMY13 3D打印EVA零号机
为什么IT大佬都不愿意带新人
苏黎世大学Nature发布!用事件相机实现低延迟汽车视觉感知
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统
用AI续写Windows开机音乐,又陌生又怀念😭,甚至还有点东方味儿
3d打印两个涡扇风扇玩玩,小电机还挺猛
MIT最新开源|野外环境下,机器人的风险感知运动规划!
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
【整整500集】微积分、概率论、泰勒公式、拉格朗日、贝叶斯分析、聚类分析等难懂的数学基础一套课程一网打尽!—人工智能/机器学习/高等数学
3D打印自动追踪防空笔筒开源分享
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
2021年度盘点:十大最佳开源SLAM算法!
仅需73ms即可重建一帧,无需3D卷积的3D重建!UCL等最新开源,ECCV2022!
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
纯手工打造-宇宙最强“隐形电脑”
工业视觉编程与调试
【开源】超强算法!动漫人脸自由切换,高分辨率视频风格化!南洋理工发布
最强单手炮NERF!无需五金3D打印发射器——沙锤【分享】
完美复刻Holy60镂空键盘(GH60)!立省两千~
机甲小蜜蜂加磁铁变冰箱贴改进方案
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
新型软弹变弹器,实测效果如何?【原创图纸系列】