V
主页
使用机器人实现水产养殖自动化|2021【MIT】
发布人
来自MIT Sea Grant的MIT学生和研究人员与当地牡蛎养殖者合作,通过寻求解决一些最大挑战的解决方案来推动水产养殖业的发展。 在科德角的 Ward Aquafarm,机械工程、海洋工程、电气工程和计算机科学专业的学生共同设计了一个机器人来帮助翻转牡蛎袋。
打开封面
下载高清视频
观看高清视频
视频下载器
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
抓手机、透明试管、气球|指尖接近传感器机器人抓取|2021【日本大阪大学】
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
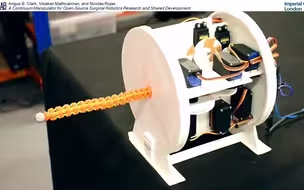
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
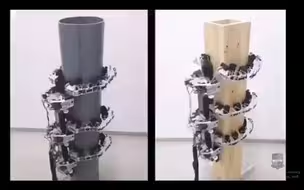
六足攀爬机器人|2019【日本法政大学】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
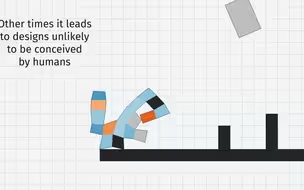
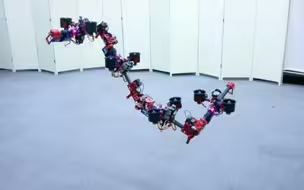
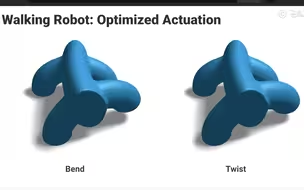
像动物一样进化的软体机器人|2021【MIT】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
我做了一个基于Arduino的动态眼睛机制
Block-NeRF:280万张图片渲染整个旧金山街区|2022【谷歌Waymo】
MIT mini cheetah通过无模型学习实现敏捷运动|2022【MIT】
机器人面部制作教程
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
无人值守TIGER|2021【韩国现代汽车】
泡泡造软体机器人|2021【Nature】
充气机械手为截肢者提供实时触觉控制|2021【MIT & 上海交通大学】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
在256KB内存的STM32上训练神经网络|2022【MIT】
复合凸轮从动机构【SIGGRAPH Asia 2021】
用于微型飞行器的液体放大执行器|2022|英国布里斯托大学【Science Robotics】
机器人如何学会徒步|2022|ETH Zürich【Science Robotics】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
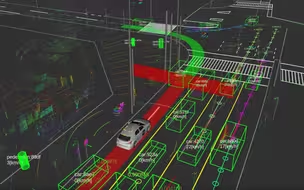
Autoware:自动驾驶开源软件项目|2022【The Autoware Foundation】
自然多接触步行|2022|RA-L【Caltech】
移动机器人的未来「Swiss-Mile」2021【苏黎世联邦理工学院】
海底捡垃圾机器人「SeaClear」2021【荷兰TU Delft】
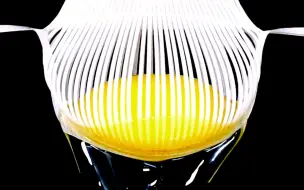
剪纸机械手轻松抓蛋黄、头发|2022|美国北卡罗莱纳州立大学【nature communication】
SpaceBok:低重力下像猫一样跳跃的机器人|2022|ETH Zürich【T-RO】
启用虚拟移动「本田Avatar Robot」分身机器人|2021【日本本田技研工業株式会社】
葡萄种植、除草「农业机器人」|2021【法国Naïo Technologies】
关节顺应性对仿生蹄动态防滑性的意义|2019|帝国理工学院【T-RO】
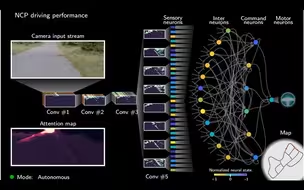
类脑神经网络只需 19 个控制神经元即可驾驶汽车「自动驾驶」2020|MIT【Nature Machine Intelligence】
四足爬壁机器人-90度墙面、天花板倒立|2022|KAIST&美国伊利诺伊大学【Science Robotics】
开源动力机器人倡议:四足机器人Solo和双足机器人Bolt|2022【纽约大学&马普所&苏黎世联邦理工】
遥操作Little HERMES双足机器人|2019【MIT】
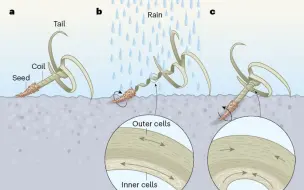
空中播种的自主自埋种子机器人|2023 |Nature【CMU】
仿生蜜蜂BionicBee|2024【Festo】
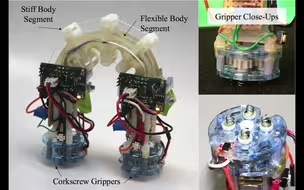
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
Ballie|2020【韩国三星】