V
主页
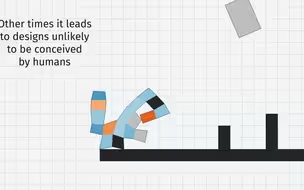
复合凸轮从动机构【SIGGRAPH Asia 2021】
发布人
https://sutd-cgl.github.io/supp/Publication/projects/2021-SIGAsia-3DCamMech/index.htm
打开封面
下载高清视频
观看高清视频
视频下载器
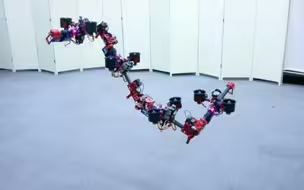
SELDA驱动的机器人腿跳跃|2022【IROS】
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
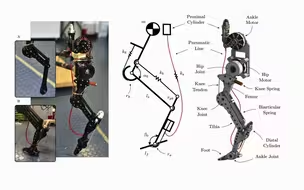
birdbot:一种高效节能的机器人腿|2022|Science Robotics【德国马克斯·普朗克研究所】
软机器人学习爬行|2022【丰田工业大学芝加哥分校】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
日常机器人everyday robots报道合集|2021【X & Google】
基于解剖学的全尺寸人形机器人|2021【Automaton Robotics】
VR遥控机器人,超越你的身体|BEOMNI 1.0|2022 CES【Beyond Imagination】
神经步态:学习双足运动|2022【加州理工Caltech】
开源仿生机器腿|2021【密歇根大学】
Strandbeest进化|2021【Theo Jansen】
人形机器人AI平台「Ameca」2021【英国Engineered Arts】
开源六足机器人MiniRHex|2018【CMU】
使用机器人实现水产养殖自动化|2021【MIT】
自动布局建筑机器人「FieldPrinter」|2021【美国Dusty Robotics】
用于微型飞行器的液体放大执行器|2022|英国布里斯托大学【Science Robotics】
玩滑板走钢丝「飞行双足机器人LEO」2021|加州理工学院Caltech【Science Robotics】
自然多接触步行|2022|RA-L【Caltech】
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
像动物一样进化的软体机器人|2021【MIT】
MIT赵选贺讲座:磁性软体机器人【AIM2020 Workshop】
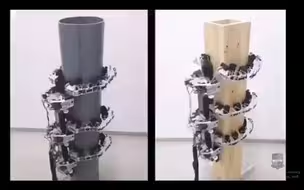
六足攀爬机器人|2019【日本法政大学】
Husky机器人监测南极企鹅种群|2022【Clearpath】
在256KB内存的STM32上训练神经网络|2022【MIT】
软连续体机械臂|ICRA 2022【ETH Zurich】
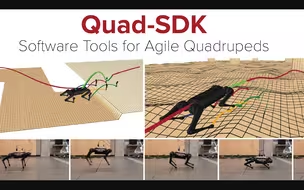
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
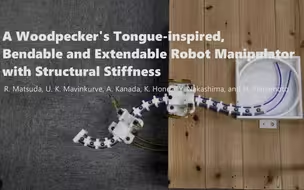
啄木鸟启发的机械手|2022【日本九州大学】
Block-NeRF:280万张图片渲染整个旧金山街区|2022【谷歌Waymo】
关节顺应性对仿生蹄动态防滑性的意义|2019|帝国理工学院【T-RO】
机器人手利用触觉感知抓鸡蛋「触觉感知传感器DIGIT」2021【Facebook】
充气机械手为截肢者提供实时触觉控制|2021【MIT & 上海交通大学】
AnyLoc:迈向通用视觉位置识别|2023【CMU】
新纤维制造呼吸可调节“机器人”纺织品「可穿戴机器人」2021【MIT】
多臂有效载荷操作-混合现实|2022【苏黎世联邦理工学院】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
机器人地下挑战赛Ignition|2022【Open Robotics】
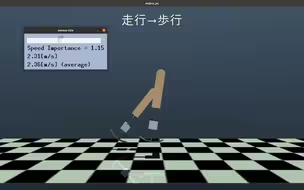
学习双足走与跑切换|2022【日本东北大学】
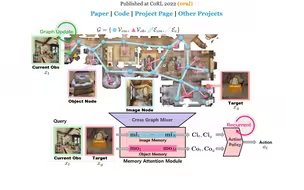
拓扑语义图存储器 |CoRL 2022【首尔国立大学】
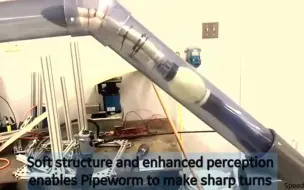
管-虫机器人“Pipe-worm” Robot|2022【通用电气】