V
主页
多智能体系统一致性基础-4-图矩阵基础2
发布人
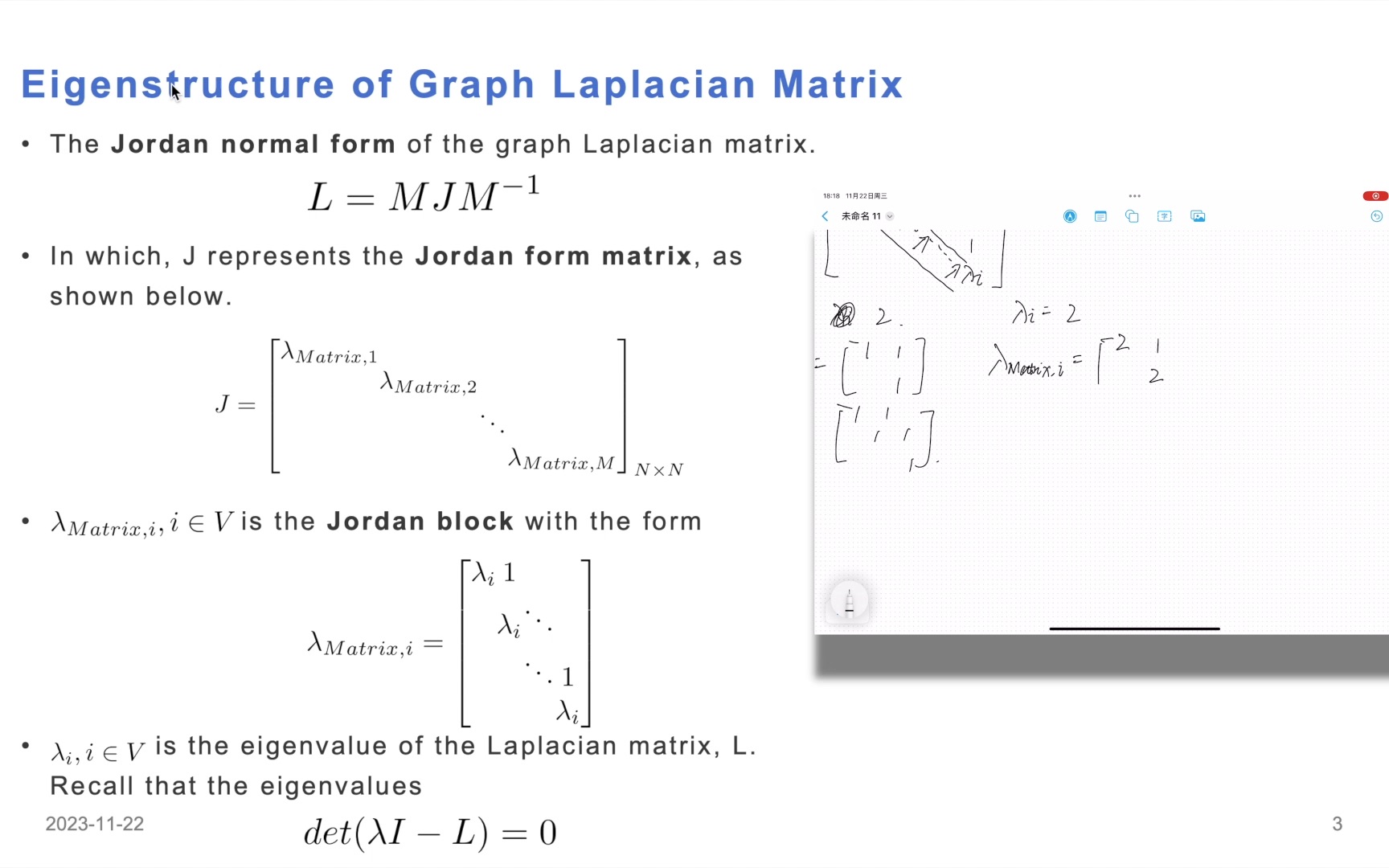
在机器人集群的分布式任务分配工作中,多智能体系统一致性分析是一个基础性的工作,而代数图论是一致性分析的数学工具。这里讨论拉普拉斯矩阵的特征值特性
打开封面
下载高清视频
观看高清视频
视频下载器
多智能体系统一致性介绍-1-代数图论基础
多智能体系统一致性基础-3-图矩阵基础
多智能体系统一致性基础-7-单积分器动力学的一致性
多智能体系统一致性基础-2-强连接图特性讨论
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
多智能体系统一致性基础-10-一阶时间离散动力系统的一致性1
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
多智能体系统一致性基础-9-一阶系统一致下的运动不变特性
多智能体系统一致性基础-6-系统一致性定义
多智能体一致性实验进度跟进-2-包含3个智能体的Perron离散时间系统一致性模拟
第一篇全华班IEEE TRO best paper :分布式快速协同探索多无人机系统RACER
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
【大模型入门】手把手教你多智能体框架swarm:开源多Agent编排框架 Swarm(Swarm框架概述、安装与使用教程、应用场景)
多智能体系统一致性基础-5-图矩阵基础3
多智能体一致性实验进度跟进-1-本机多智能体通信框架搭建完成
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
凸优化中一阶偏导数矩阵与二阶偏导数矩阵(海森矩阵)的定义介绍
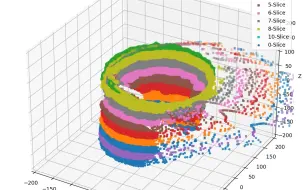
采用3D深度相机和切片方法测量人体体积
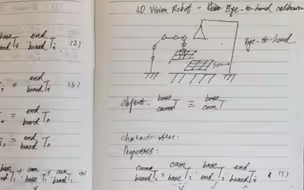
2D视觉机器人的手眼标定流程记录
【大模型实战】实战OpenAI最新开源swarm智能体!swarm框架 Swarm本地化部署实战;卢菁博士授课-多智能体快速入门与项目开发实战
AI 大模型周报 2024年10月 d
神经网络的简单讨论-简单神经元模型
215:顶刊复现:多智能体有限时间分布式事件触发一致性控制
3D视觉机器人的手眼标定流程记录
遗传算法NSGA-2的基本计算流程讨论
分布式资源分配在机器人集群中的应用动机讨论
点云配准的ICP算法测试
使用3D视觉机器人完成无序抓取的调查报告
3D视觉机器人中手眼标定的精度提升方法记录
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法1-问题构造
小型室内机器人调度系统介绍-2-调度系统功能
【TAC】【完全分布式】多智能体完全分布式事件触发
使用整数规划制作调度系统-理论介绍
非线性系统介绍-1-Flows on the line
RoBIM智能割焊机器人解决方案应用介绍
机器人集群模拟程序介绍-1-动机、目标、功能
分布式机器人集群的初步讨论
深度相机的性能评估
视觉导航的ICP算法效果
【多智能体二阶一致性】【滑膜控制】多智能体中使用固定时间收敛滑模面达成鲁棒的二阶一致性