V
主页
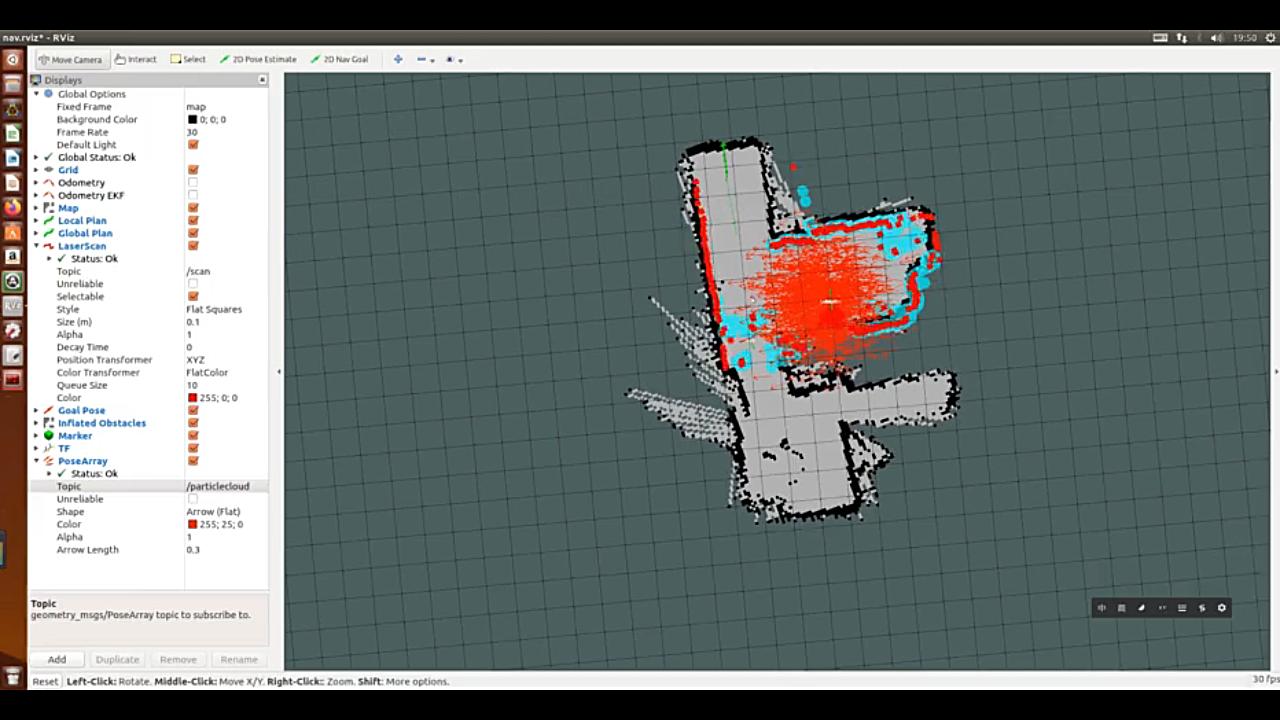
【ROS机器人】激光雷达SLAM建图 & 自主导航
发布人
ROS机器人的成果展示
打开封面
下载高清视频
观看高清视频
视频下载器
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
DOM 60适用于机器人的3D激光雷达
也是玩上ROS了
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
轮足静态障碍物导航避障
SLAM着色点云模型三维重建!
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
北理工&哈里发大学 卫星信号拒止海洋环境的多阶段无人船自主导航
赛尔最近出了一款风声很大的手持激光扫描仪,今天我们一起测试下赛尔SLAM S10的RTK精度如何吧?#三维激光扫描仪 #SLAM
港大MARS实验室发布! Fast-LiVO2:快速、直接的激光雷达惯性视觉里程计
这几年,激光雷达发展迅速,成本也下降许多,性价比就上来了
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
2025年 物流搬运机器人 树莓派开机自启动程序
美的m7max提示请清理激光雷达
SLAM着色点云精细建模园林石雕!
当霸王龙装上激光雷达,今次仲唔到我发威!
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
vinsfusion改进添加线特征
业内目前唯一公开纯固态Flash激光雷达实测车载补盲芯探科技M120Ultra点云实录
就说这线找的稳不稳吧(第二季)
自制ros建图导航机器人2
最新猫女机器人
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
微型无人机群SLAM
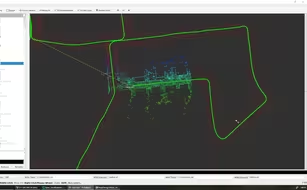
基于先验地图的通用激光雷达定位框架
其域创新发布旗舰级手持SLAM产品——灵光 L2 Pro
r3live语义建图
机器人悬挂设计
[开源] 基于Qt的ROS1/ROS2人机交互软件-V0.3.7版本,优化建图时的地图显示效果
视觉SLAM的本质多视图几何
套件教程-FAST LIO2之点云建图
钧舵EPG50-60柔性夹爪 ROS SDK–法奥FR3长臂猿模式
视觉组 | YOLO自瞄终于能打中了
每天都跑几圈,机器人底盘,室内slam
9月24日,新品发布!