V
主页
京东 11.11 红包
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
发布人
VIOBOT 结合 tof 相机进行实时稠密三维重建。 VIOBOT 在运动中扫描与感知周边环境。将多传感器提供的图像信息、深度信息及惯性信息融合,进行实时三维重建,详细还原周边环境。
打开封面
下载高清视频
观看高清视频
视频下载器
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT【功能演示——地表爬纹】“实测”
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
三维空间扫描仪 高效率重建古建筑
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
GPS+IMU+3D激光建图
视觉惯导融合SLAM内外参标定是关键
轮式里程计激光里程计视觉里程计区别是什么
VIO核心组件 带你轻松感知三维世界!!!!科技魅力
SLAM为什么需要IMU
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
Go2开发教学10-SLAM 导航服务接口
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
除了激光SLAM和视觉SLAM还有哪些研究方向
听劝不要轻易入坑SLAM
华山区大范围激光视觉惯性SLAM建图
ChainSLAM实时建图演示
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
slam多功能救援无人机
TvT.js又一波更新特效扑面而来 tres.js vue3 three.js 三维可视化
数学之美—编程可视化呼吸曲面(BreatherSurface),呈现令人惊叹的三维结构变化
VINS算法视觉惯导融合SLAM
SLAM Zero to One
多传感器融合SLAM松耦合与紧耦合
为什么需要多传感器融合
DOM-60 为机器人带来前所未有的感知能力
机器学习与SLAM怎么结合
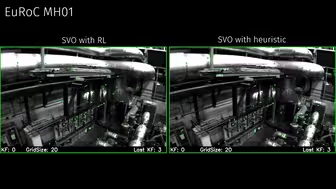
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!
Infinite-SLAM,建图与标定工具部分展示
SLAM算法为什么需要内存管理机制
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
强化学习给视觉里程计自适应调参
马斯克特斯拉机器人的最新视频和技术解析
个人三维动态作品集&C4D&UE5&XP
三维空间扫描仪,轻松重建小树林
【个人作品】maya IKFK实时切换 绑定工具插件展示