V
主页
ROS2功能系列视频教程 (三)| ROS2gmapping建图
发布人
ROS2功能系列视频教程第3期—ROS2gmapping建图,本期视频主要是关于ROS2当中使用gmapping建图算法进行建图功能的演示与讲解,包括如何保存地图。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2功能系列视频教程 (六)| ROS2 2D导航
ROS2功能系列视频教程 (二)| ROS2键盘控制
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
ROS2功能系列视频教程 (十二)| ROS2 KCF跟随
ROS2入门系列视频教程 (三)| ROS2通信机制的简介
ROS2入门系列视频教程 (六)| rqt工具箱
ROS2入门系列视频教程 (十一)| ROS2其他通信类型的使用
ROS2入门系列视频教程 (四)| ROS2命令行工具
ROS2入门系列视频教程 (十二)| ROS2Launch启动文件管理工具
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
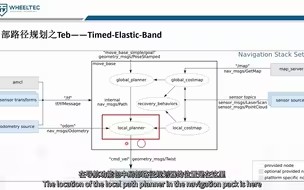
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
ROS2入门系列视频教程 (五)| rviz2数据可视化工具
从零开始实现一个球平衡机器人(附源码讲解)
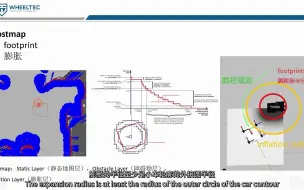
ROS 2D导航原理系列(一)|Costmap
《ROS2 机器人操作系统》实验一:ROS2 的安装
ROS入门系列教程|WHEELTEC
ROS2功能系列视频教程 (十)| ROS2 WEB浏览器监控
ROS2入门系列视频教程 (九)| ROS2话题通信的c++实现订阅方
ROS 2D导航原理系列(五)|全局路径规划-Astar
ROS2入门系列视频教程 (八)| ROS2话题通信的c++实现发布方
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
WHEELTEC自研球平衡机器人系列产品
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
ROS麦轮系列机器人功能演示(WHEELTEC)
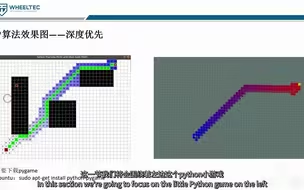
强化学习在ROS2中实现巡线小车
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
2024年TI杯全国大学生电子设计大赛 宽度小于15cm的R3X轮式小车配合惯导走直线效果演示与代码开源
手把手教你如何通过STM32与N10激光雷达实现小车跟随
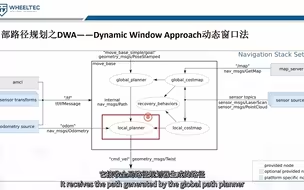
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
激光SLAM的入门讲解视频教程(一)|SLAM简介
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
代码全开源!基于STM32实现二阶倒立摆功能讲解
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车K210智能识别巡线OLED显示屏教程原理讲解与效果演示代码开源
【全749集】比付费还强10倍的自学Python全套教程,2024最新版,全程通俗易懂,别再走弯路了,小白看完速通Python全栈!
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车PID闭环控制巡线原理讲解与效果演示代码开源