V
主页
人工势场法 APF 虚拟障碍物 避开极小值问题 路径规划算法 apf 动态规划 改进算法
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
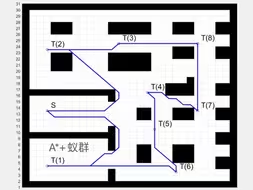
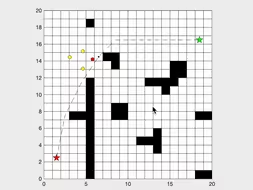
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法
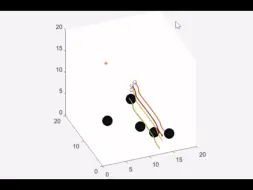
人工势场法 编队 三维 多机器人 动态障碍物 动态规划 APF路径规划 apf协同编队 数据图丰富 动态避障 红色方块是动态障碍物 无人机路径规划 UAV 编队
改进的A* Astar A星+改进的人工势场apf混合算法。动态路径规划
改进A*与改进人工势场APF的路径规划算法。A星算法 Astar 融合apf astar 改进路径规划 邻域搜索改进 动态加权 冗余点删除 改进APF斥力函数
人工势场法 APF 动态障碍物 apf 动态路径规划 Matlab 路径规划
RRT 双向RRT 融合APF 人工势场法 结合Dijkstra优化路径 rrt 改进 路径规划 apf 融合算法 对比路径规划
无人船路径规划 人工势场法 APF apf 路径规划算法 动态障碍物 动态规划
改进人工势场法 APF apf 路径规划 静态障碍物 动态障碍物 动态目标点 改进路径规划算法 apf APF 动态规划
人工势场法(APF)动态路径规划 加入了移动障碍物,apf
人工势场法 APF 改进路径规划 加入虚拟目标点 解决了陷入极小值问题 改进apf 路径规划 动态规划
全覆盖路径规划 CCPP 规则遍历 A*避障 Astar A星 路径规划 内螺旋遍历 ccpp 路径规划算法 动态规划
多AGV路径规划。时间窗口规划,避开同一位置同一时间相遇。相同时间内不相遇的路径规划算法。仿真避开相遇问题 ,输出路径图,时间坐标曲线
RRT星 人工势场法 APF 融合算法 动态障碍物 动态避障规划 apf路径规划 rrtstar rrt 图像处理 RRT* rrt* 路径规划
基于领航跟随法与人工势场法的的多机器人编队协同避障 APF路径规划 动态规划 apf 领航者
领导者跟随者+APF apf 交互式弹窗 可以变换正方形队形 基于领航跟随者和人工势场法的多机器人编队仿真控制,变换队形避障。多机器人协同控制 路径规划 编队
A星算法融合人工势场法APF 动态路径规划 Astar 算法引导 apf 路径规划 A* 算法 混合算法 动态避障 astar算法提供子目标点 避免规划路径冗长
三角编队 APF 人工势场法 apf 动态路径规划 编队
船舶路径规划 人工势场法 APF apf 动态规划 海上路径规划
多机器人路径规划 具有优先级 A*算法 蚁群算法 Astar aco astar 动态障碍物 动态路径规划
路径规划算法 改进A*和改进动态窗口融合算法 Astar 动态窗口法 Matlab
人工势场法 APF 路径规划 有碰撞点,复航点,可计算船舶危险度,两船之间的距离,船的方向变化。apf路径规划,结合海事避碰规则,船的航向角变化,可以设置多条船
编队 人工势场法 APF 保持队形 动态障碍物 动态避障 apf 路径规划 编队 动态规划
人工势场法 APF 改进算法 融合模拟退火算法 SA 解决陷入极小值问题 三维路径规划 Matlab apf-sa 融合算法
密度聚类算法-RRT* 混合算法 比传统混合A*算法计算效率高、路径平滑性好 RRT星 路径规划 rrtstar 三维 二维编队避障 APF人工势场法 目标偏置
GUI系统 A* 多机器人 路径规划 时间窗 改进Astar 系统可输出路径长度,每个时间的点的坐标 GUI 系统简单操作 A星算法 动态规划 时空图 四方向
人工势场法路径规划 apf 路径规划 APF 动态障碍物 动态规划
三维改进A*+人工势场法 融合算法 路径规划算法 双向Astar A星算法 路径规划 apf APF 动态规划 立体地图
三维路径规划 人工势场法 APF apf 动态障碍物 动态路径规划
多目标路径规划 A*+模拟退火 A*+蚁群 用A*算法规划两点间的距离,然后依据规划路径距离模拟退火算法或者蚁群算法运算全过程最短距离 ACO Astar SA
基于领航跟随法与人工势场(APF)法的编队动态避障 三维路径规划 UAV apf 编队控制 动态规划 多机器人 编队采用领航跟随,避障与避碰采用人工势场法无人机
编队路径规划 基于分布式控制策略 编队+避障+避碰+自重构 多机器人 自重构 UAV 编队 可以和RRT融合 融合算法 改进路径规划 动态路径规划
基于领航跟随法+A星(A*)Astar 结合人工势场(APF)法的多智能体编队动态避障 编队包含集结和保持队形移动两个过程 编队采用领航跟随,改进APF A*
人工势场法 APF 路径规划 采用多步长 apf 动态规划
传统A星与改进A星的编队路径规划,采用5*5邻域搜索、动态加权 考虑编队队形,根据编队尺寸大小对障碍物进行膨胀处理,一字型,三角形编队 Astar A*
人工势场法 路径规划算法 多目标 APF路径规划 三维 山地地图 apf 动态规划 全向模型
RRT*与自重构的UAV编队避障 行为法和人工势场法APF的分布式控制 RRT*生成全局路径,提取关键点作为局部路径点引导 目标导航+避障+避碰+自重构 编队
改进的人工势场(APF)多智能体多目标点的路径规划。机器人路径规划。引入了智能体之间的排斥力来避免智能体之间的碰撞。
三维人工势场法 路径规划 APF apf 动态路径规划 3D路径规划
生物激励神经网络全覆盖路径规划 可变栅格大小 动态规划 神经网络 Matlab 采用实时监测机器人邻域神经元状态的方法 引入邻域神经元状态准则
多机器人路径规划 多AGV路径规划基于改进A星与改进人工势场APF的多机器人路径规划 Astar APF 融合改进路径规划 A*算法 apf算法 多机器人