V
主页
数学建模
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
数学建模-确定性数学方法
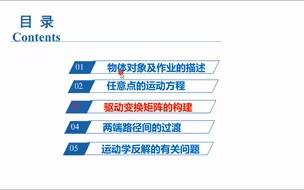
机器人学 l 7.3.3 笛卡尔空间中的轨迹规划
机器人学 l 3.3机器人逆向运动学(以puma560为例)
数值分析 | 第一讲 绪论
机器人学 l 7.1 机器人轨迹规划的相关概念
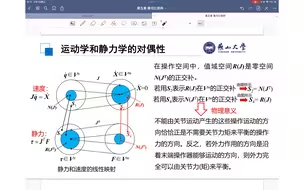
机器人学 l 3.8 力雅可比矩阵以及运动学和静力学之间的对偶关系
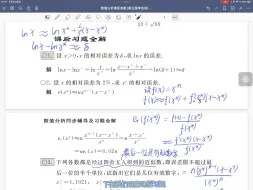
数值分析 | 第二章 插值理论习题讲解
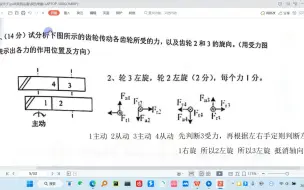
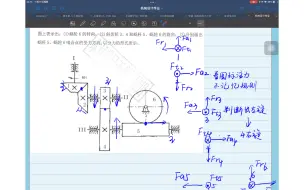
机械设计 | 齿轮受力方向判断 | 齿轮旋向判断
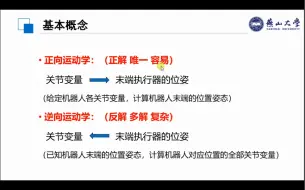
机器人学 l 3.4 逆向运动学相关的三方面问题
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
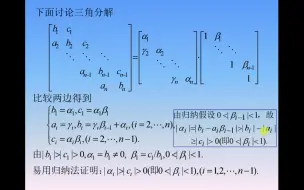
数值分析 | 第16讲 | 针对三对角矩阵的Clout分解(追赶法)
数值分析 | 第一章习题讲解
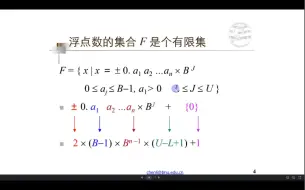
数值分析 | 第2讲 浮点数
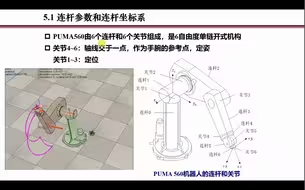
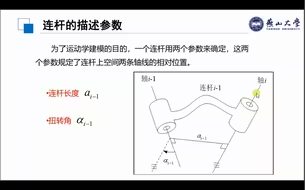
机器人学 l 3.1 连杆参数和关节变量
机器人学 l 7.3.2 笛卡尔空间中的轨迹规划
自动控制原理|数学模型|自学
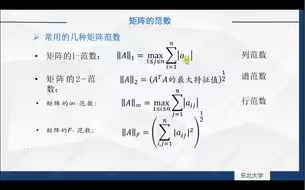
数值分析 l 第19讲 矩阵范数
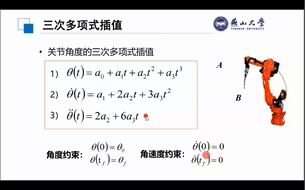
机器人学 l 7.2 轨迹规划中的三次多项式插值
坚持更新数学了
矩阵论 | 1.2b坐标,基变换与坐标变换
自动控制原理/西安交通大学/数学模型/微分方程
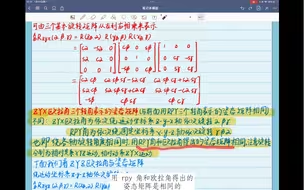
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
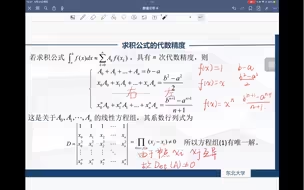
数值分析 l 第37讲 数值求积公式的代数精度
数值分析 | 第17讲 | 向量范数
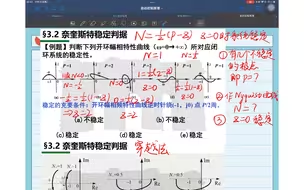
自动控制原理/奈奎斯特稳定判据如何应用/正负穿越法
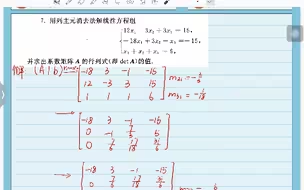
数值分析|习题讲解1 |李庆扬主编第五版 |列主元消去法
数值分析 | 拉格朗日插值以及截断误差的估计
自动控制原理/复阻抗法求传递函数
高中数学
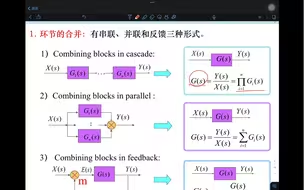
自动控制原理/闭环传递函数/方块图的等效变换/扰动输入/偏差输出/两级RC串联电路/
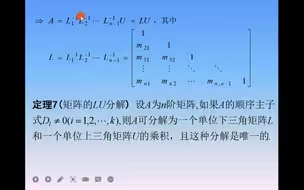
数值分析 | 第13讲 线性方程组的矩阵三角分解法(LU三角分解)
英语词汇记忆/英语口语
关注自己的生活 | 做自己生活的主人
数值分析 | 第七讲 数值运算的误差估计
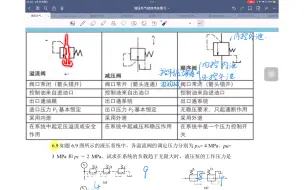
液压与气动技术 | 溢流阀 减压阀 顺序阀讲解
机械设计/受预紧力和工作拉力的螺栓连接
机器人学 | 2.3 齐次变换矩阵及其三重物理意义
数值分析 | 第14讲 | 矩阵LU三角分解(举例)
机械设计/齿轮受力方向判断/涡轮蜗杆受力方向判断
自动控制原理/梅森公式/误差传递函数