V
主页
[ICRA 24] Resilient Legged Local Navigation
发布人
Paper: https://arxiv.org/pdf/2310.03581.pdf WebPage: https://bit.ly/45NBTuh Jin Jin* and Chong Zhang*, Jonas Frey, Nikita Rudin, Matías Mattamala, Cesar Cadena, Marco Hutter (*EQUAL contribution, contact: jinjin@ethz.ch, chozhang@ethz.ch)
打开封面
下载高清视频
观看高清视频
视频下载器
天天吹大气,实验室稳如老狗,实战狗且偷生,有本事放个野外视频啊!好的,来了老弟!
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
RL驱动下的机器人日常训练
呐, 这就叫优雅~
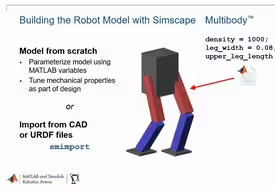
基于模型控制的人形机器人行走 MATLAB and Simulink
[Science Robotics] 轮足机器狗 Navigation and Locomotion #ScienceRobotics
[Science Robotics] DTC: Deep Tracking Control. 我们在#ScienceRobotics上的最新成果!快来一键三连!
"赛博吗喽"? 机器狗变成猴了!
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
[Science Robotics] ANYmal Parkour
苏黎世联邦理工学院 ETH Zurich 机器人系统实验室 RSL 来B站啦!!!
基于分层优化的四足机器人全身运动控制搬运重物
3月调试寄录-失败
双足机器人步态生成 MATLAB and Simulink
[RSS 24] Rethinking Robustness Assessment 重新思考鲁棒性评估
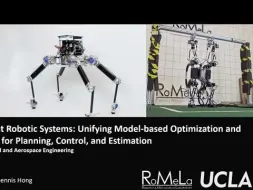
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
人形机器人 手指机械结构
赛博道哥
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
双足机器人的建模与仿真 MATLAB and Simulink
WAIC 2024|踢不到的狗,你的真的狗!
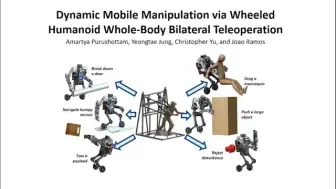
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
[ICRA 24] 利用3D表征在狭窄空间中穿梭
可灵AI图生视频测试
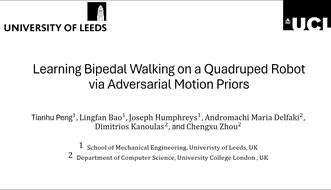
通过对抗运动先验学习四足机器人的双足行走
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
[ICRA 24] Learning Risk-Aware Locomotion 学习可以感知危险的运动控制
Go2开发教学07-实验示例一,遥控器切换运控
2024智源大会 特邀报告 Reinforcement Learning with Large Datasets
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
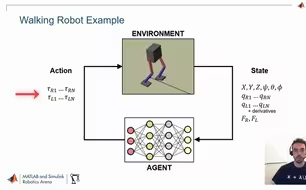
双足机器人的深度强化学习- MATLAB and Simulink
学习记录:机器狗MPC控制
早期人类驯服人工智能珍贵影像资料
四足机器人沙滩行走
Go2使用教学04-标定教程
宇树B2倒立行走
这才是机器人最终形态
[ICRA 24] ViPlanner: Visual Semantic Imperative Learning for Local Navigation
Go2使用教学05-运动姿态介绍
买了成品机器人,花了一周建模,准备上机