V
主页
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
发布人
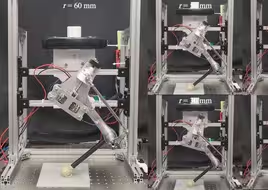
https://www.youtube.com/watch?v=mn8tCtYHzHI Tello Leg: The Study of Design Principles and Metrics for Dynamic Humanoid Robots Youngwoo Sim, Joao Ramos To be useful tools in real scenarios, humanoid robots must realize tasks dynamically. This means that they must be capable of applying substantial forces, rapidly swinging their limbs, and also mitigating impacts that may occur during the motion. Towards creating capable humanoids, this letter presents the leg of the robot TELLO and demonstrates how it embodies two new fundamental design concepts for dynamic legged robots. The limbs follows the principles of: (i) Cooperative Actuation (CA), by combining motors in differential configurations to increase the force capability of the limb. We demonstrate that the CA configuration requires half the motor torque to perform a jump in comparison to conventional serial design configurations. And (ii) proximal actuation, by placing heavy motors near the body to reduce the inertia of the limb. To quantify the effect of motor placement on the robot's dynamics, we introduce a novel metric entitle Centroidal Inertia Isotropy (CII). We show that the design of state-of-the-art dynamic legged robots empirically increase the CII to improve agility and facilitate model-based control. We hope this metric will enable a quantifiable way to design these machines in the future. https://arxiv.org/abs/2203.00644
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人步态生成 MATLAB and Simulink
人形机器人腿部结构 基于 4DoF 球面并联机构
通过优化理论指导设计双足以达到控制和任务的最优
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
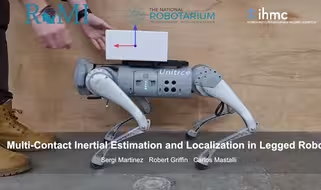
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
有开源github代码! RA-L论文 人形机器人的多接触全身控制
幽灵机器人 Ghost Robotics - Vision 60
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
人工肌肉驱动的人形机器人|2024【Clone】
宇树狗儿 新增功能〖跳跃跑〗
真牛!这个人形机器人吊打很多厂家的“产品”
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
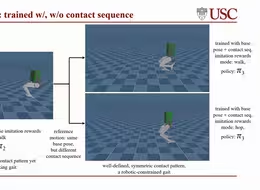
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
2天学会,仿人自然行走
西部世界 | 仿生人类机器人 | 它真的实现了 | 仿生机器人 Clone | 人工智能 |
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人
华为下场,盘点国产人形机器人4家核心公司
里掂竟然变成话痨!!!莫非ta有大模型?国语、粤语、英语......,多种语言轻松应对!
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
南京人形机器人公司完成1.3亿元融资,国家级、省级母基金都投了
呐, 这就叫优雅~
【高清】波士顿动力全电Atlas开始进厂打工了【抓取+蹲起】【人形机器人】
云深处DR01人形机器人,野外实训,越野性能强大!
【揭秘】五指灵巧手DexHand021 产线组装的秘密
青龙openloong 上10cm台阶 上0.2rad斜坡
Humanoid Locomotion as Next Token Prediction
郭涛|华为具身智能产业创新中心正式运营 布局人形机器人领域
家庭陪伴机器人量产…
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Figure 02 人形机器人
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
国产 | 像人一样站立行进的机器狗 W1 | 逐际动力 |
Go2开发教学11-ROS2 服务接口
“定制化体验,无限可能:人形机器人的个性化功能展示”
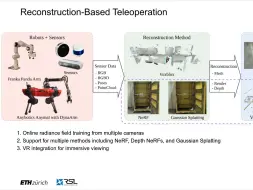
ETH | Anymal 机器人远程操作的辐射场
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged