V
主页
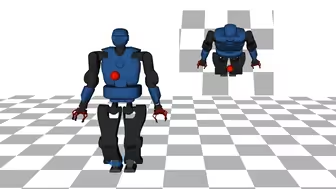
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
发布人
https://www.youtube.com/watch?v=Y6I8hgZZF_g Sim-to-Real Learning for Humanoid Box Loco-Manipulation Jeremy Dao, Helei Duan, Alan Fern In this work we propose a learning-based approach to box loco-manipulation for a humanoid robot. This is a particularly challenging problem due to the need for whole-body coordination in order to lift boxes of varying weight, position, and orientation while maintaining balance. To address this challenge, we present a sim-to-real reinforcement learning approach for training general box pickup and carrying skills for the bipedal robot Digit. Our reward functions are designed to produce the desired interactions with the box while also valuing balance and gait quality. We combine the learned skills into a full system for box loco-manipulation to achieve the task of moving boxes from one table to another with a variety of sizes, weights, and initial configurations. In addition to quantitative simulation results, we demonstrate successful sim-to-real transfer on the humanoid https://arxiv.org/abs/2310.03191
打开封面
下载高清视频
观看高清视频
视频下载器
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
有开源github代码! RA-L论文 人形机器人的多接触全身控制
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
人形机器人足底机械结构设计
MuJoCo 仿真 案例欣赏
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
双足机器人步态生成 MATLAB and Simulink
双足机器人的建模与仿真 MATLAB and Simulink
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
【通用】人形机器人RL策略Gazebo二次仿真框架
基于分层优化的四足机器人全身运动控制搬运重物
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
How to design nonlinear MPC with deep learning prediction model
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
人形机器人 手指机械结构
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
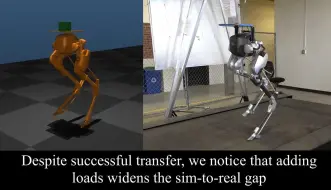
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
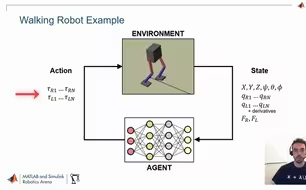
双足机器人的深度强化学习- MATLAB and Simulink
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
我们把机器人拉出门散了个步,还是原来的模型,没有新训练 [Humanoid Parkour Learning]
基于模型控制的人形机器人行走 MATLAB and Simulink
真牛!这个人形机器人吊打很多厂家的“产品”
A Feasibility-Driven Approach to Control-Limited DDP
(ICRA 2024) 腹腔镜手术基础的模仿学习
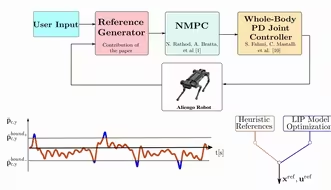
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
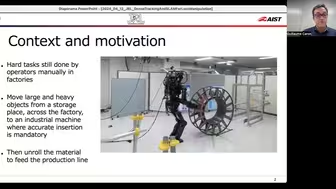
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
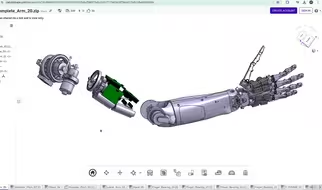
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
人形机器人灵巧手臂最新成果
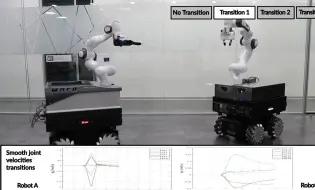
A Distributed Processing Approach for Smooth Task Transitioning in SHC
CasADi 3.6 tutorial (C++ Matlab Python)
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot