V
主页
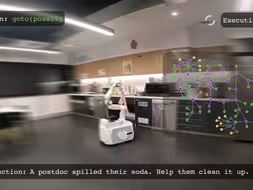
本科毕业涉寄-sawyer具身智能(模仿学习执行任务+大语言模型任务调度)
发布人
答辩结束分享出来看看,末端执行器姿态语音微调是大语言模型仿ChatGPT for Robotics,夹取和放置是基于模仿学习(改进的aloha act) 有朋友喜欢可以慢慢继续分享一些细节(嘿嘿,相互交流学习)
打开封面
下载高清视频
观看高清视频
视频下载器
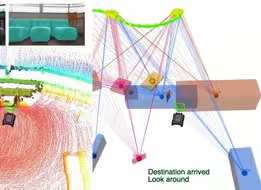
【论文速递】具身智能SayPlan: ChatGPT + Robotics + 3D Scene Graphs
【论文速递】具身智能机器人新里程碑!!3D-VLA:上海交大+MIT联合发表,具身智能突破2D基础模型,实现3D世界模型
【项目分享】复现开源Open-TeleVision机器人模仿学习摆箱子
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
Aloha-ACT 在单臂上模仿学习仿真系统(基于Coppliasim+RLBench)
用文心一言驱使机械臂搭积木,从感知到理解到编排与生成,探索CV+大语言模型的落地开发
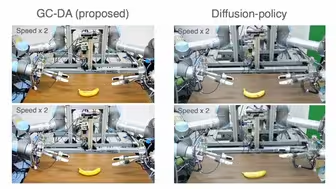
【TRO 2024】灵巧双臂机器人操纵的目标条件双臂动作模仿学习
【论文速递】具身智能SayNav:Robotics+LLMs+Scene Graph+Low Level Planner
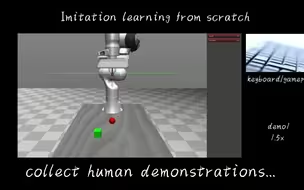
使用自定义环境收集数据集并基于diffusion policy训练一个简单的抓取任务
具身智能领域最容易落地的方向-遥操作
低成本机械臂模仿学习 #lerobot #tau
ChatGPT+机器人:帮我拿一个苹果颜色的方块?
开源具身智能抓取平台RoboButler
模仿学习1 - 什么是模仿学习
你的具身智能第一课--基础技术路线
具身智能
零样本操控机器人,李飞飞团队新作Voxposer【双语字幕】【4K】
【共享LLM前沿】直观理解具身智能-LLM大模型优化技术!
基于大语言模型的机器人行为自动编排和任务执行
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
一群年轻人,5个月时间,实现具身机器人从无到有,勇敢实现科技梦想
机械臂接入GPT4o大模型,秒变多模态AI贾维斯
【已开源】蜘蛛形四足机器人(ESP8266+softAP动态调节姿态)
字节MOMA Force视力觉模仿学习,机器人丝滑移动同时精细操作
具身智能——LLM for robotics
要是这个参加2022年电赛C题能拿奖吗?!
听得懂人话、看得懂图像、指哪打哪的机械臂是怎么炼成的
6 元 自 制 陀 螺 仪,来 看 看 效 果
四川省大学生机器人大赛 · 驯服熊猫乐园珍贵影像
GPT算什么,具身智能才是未来
【isaac sim-15】具身仿真-你的第一个机械臂程序
上交大通过具身智能实现机器臂刮胡子!
我们成功了!把多模态大模型和机械臂结合到一起,效果很惊艳!
【北京大学-董豪】具身智能技术趋势分析 2024.8
用能量机关给大家放一朵烟花
具身智能基础技术路线
isaac sim具身智能仿真系列:【2】快速了解一下perceptor和manipulator(佛系胡乱更新中)
MiniFly无人机遥控器版坦克大战
GPT+人形机器人Figure01原理诚实解析【具身智能02】
你也想玩平衡车?组装一个大概多少?