V
主页
Xarm6机械臂——从SolidWorks导出urdf全过程【上科大 STAR中心 RIM LAB】
发布人
欢迎关注~ 知乎教程文章:https://zhuanlan.zhihu.com/p/721320821 课题组主页:https://rim-laboratory.github.io/ 导师主页:https://sist.shanghaitech.edu.cn/xcx/main.htm 个人主页:https://hurunze.godaddysites.com/ 模型,文件:https://www.cn.ufactory.cc/xarm-download
打开封面
下载高清视频
观看高清视频
视频下载器
#硬核送上门#为什么要奖励他?y⬅️wwq1
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
【硬核#我了个去, 终于找到绝版了!!!🔥#青春没有售价,疯狂就在当下!*&&%!@#!#¥%
【中英字幕】强化学习和模型预测控制18讲!四大名校教授精讲模型预测控制、最优控制、强化学习入门
这可能是我见过强化学习和模型预测控制最好的教程!四大名校教授精讲动态系统和仿真、最优控制、策略梯度方法、MPC
【具身论文阅读】视触联觉灵巧手操作
Isaacsim/IsaacLab中URDF-USD模型转换,碰撞体查看与修复
四足机器人足臂协同 ocs2 qm_control 开源项目学习
基于强化学习的机械臂固定时间轨迹跟踪控制仿真【复现】
强化学习框架-Legged Gym 训练代码详解
【MPC+强化学习】四大名校教授精讲强化学习和模型预测控制18讲!Actor Critic模型预测控制、策略梯度方法
【具身论文阅读】Diffuser: 基于diffusion的强化学习规划器
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
从模型预测控制到强化学习12:DDPG做动态控制-研究生入学培训答疑
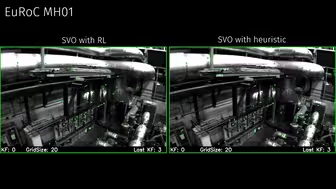
强化学习给视觉里程计自适应调参
#硬核送上门#不要在这样了!123123
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
【论文代码复现122】基于强化学习的路径规划问题||强化学习和群智能优化算法有什么区别
IsaacLab实现四足机器人AMP,视频训了1000轮,开源链接在简介
【长讲座】为何基于学习的控制有难有易?
代码实现大模型强化学习(PPO),看这个视频就够了。
硬核送上门#为什么要奖励他?🔥#逆了个天--%…………!@
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
硬核送上门#为什么要奖励他?🔥#逆了个天--yyds
硬核#我了个去, 终于找到绝版了!!!🔥#青春没有售价 # 疯狂就在当下 #ghd4
硬核送上门333
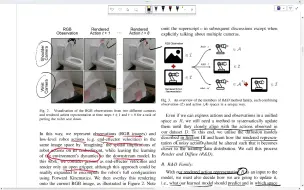
【具身论文阅读】Render&Diffuse: 渲染使状态观测空间统一
#硬核送上门#卧槽! 终于找到绝版了!#相当炸裂版 蚌埠住了?y⬅️wjj5
#硬核#为什么要#奖励他????玩的就是抽象!!(&……**&
一些基于NVIDIA Isaac Gym的开源机器人虚拟环境 无人机 水下ROV
DPO:人类偏好对齐技术——大模型训练的最后一公里
【具身论文阅读】灵巧手实现转笔任务
【三天掌握人工智能?】趁着国庆节卷一卷,开学直接快人亿步!悄悄的学习,搭腔的不要~
我愿称李宏毅强化学习为天花板课程!简单易懂!清晰明了的 PPO算法强化学习入门教程!深度强化学习、人工智能、神经网络
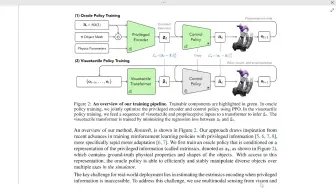
Agile Continuous Jumping in Discontinuous Terrains
【具身论文阅读】通用的视触觉的灵巧手操作
Semantic Traversability Estimation Using Pose Projected Feature
通过残差强化学习实现近距离四轴飞行器的稳健控制 四旋翼
#硬核送上门#为什么要奖励他?y⬅️weq