V
主页
西安交大&腾讯等|从局部到全局的逐帧配准,可应用于NeRF!CVPR2023
发布人
神经辐射场(NeRF)已经实现了逼真的新颖视图合成;然而,对精确相机姿态的要求限制了其应用。尽管存在用于联合学习神经3D表示和配准相机帧的合成分析扩展,但如果初始化不当,它们很容易获得次优解决方案。我们提出了L2G NeRF,一种用于束调整神经辐射场的局部到全局配准方法:首先,逐像素灵活对齐,然后是逐帧约束参数对齐。通过优化光度重建误差的深度网络,以无监督的方式学习逐像素局部对准。使用可微参数估计解算器对逐像素对应关系执行逐帧全局对齐,以找到全局变换。对合成和真实世界数据的实验表明,我们的方法在高保真度重建和解决大型相机姿态失准方面优于当前的最先进技术。我们的模块是一个易于使用的插件,可应用于NeRF变体和其他神经领域应用。 项目主页:https://rover-xingyu.github.io/L2G-NeRF/ 论文地址:https://arxiv.org/pdf/2211.11505.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
香港科技大学博士生分享:室外场景下的快速鲁棒点云全局配准(上)
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
【几何直觉】3D Gaussian Splatting(三维高斯泼溅), SuGaR 背后的几何 insight 讲解
西湖大学&浙大新开源|BAD-NeRF的捆绑调整技术,实现去模糊和恢复摄像机运动轨迹!CVPR2023
【3DGS】自定义相机教程(含代码)(三维高斯泼溅)
克服了局部极小值,用于估计6自由度目标姿态!英伟达最新发布!
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
ECCV'24开源 高质量&实时性兼顾!清华最新3D人像重建SOTA
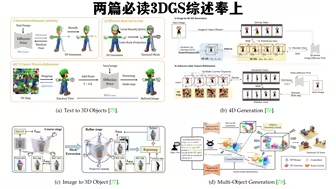
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
ECCV'24开源 | 谷歌最新涨点神器!通过3D感知微调提升2D特征
立体匹配算法原理与应用-奥比中光
CVPR2022|上科大&腾讯&Meta等新研究,人、物分层渲染,复杂交互场景下可快速重建!
比较朴素的西安交通大学2024本科录取通知书开箱
AAAI2025投稿教程Appendix不知道应该double column还是single column,不放心的话,建议邮件咨询chair
CVPR 2024最佳学生论文|Mip-Splatting: Alias-free 3D Gaussian Splatting
西安交通大学128周年城墙跑 📍西安城墙 | 留学中国vlog8
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
AAAI2025投稿教程,哲学悟道过程
RealityCapture1.4-缓存与重置
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
追踪一切?实现全局一致性的运动跟踪!康奈尔&Google等发布!
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
CVPR2022|马里兰大学新发布,直接可微相机姿态估计端到端网络!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
2021年度盘点:十大最佳开源SLAM算法!
【三维重建汇总】NeRF和GS重建中,如何排除干扰物?(RobustNeRF、PixelGS等论文汇总)
逼真!视图合成新方法,比已有方法快1000多倍!CVPR2021
ECCV22|ETHZ&Meta发布关键点NeRF,输入两张图像就可重建高保真的头像模型!
西安交通大学软件专业硕士刚毕业工资
超有用!三维重建让起重机实现无人装卸!佐治亚理工!
ETH、斯坦福与微软联合开源数据集!大几何和时间变化下的三维点云配准的时空基准
现在是否是大语言模型的垃圾时间?
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇