V
主页
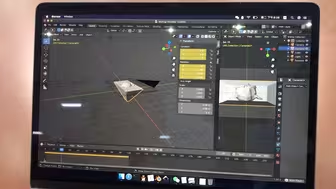
机器人集群模拟结果的Blender可视化显示
发布人
为了直观地显示机器人集群模拟结果,采用Blender对机器人和地图进行显示,通过在blender下进行脚本编写,实现自动加载地图和机器人运动数据,自动建立动画关键帧,并通过blender的动画功能进行可视化显示
打开封面
下载高清视频
观看高清视频
视频下载器
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
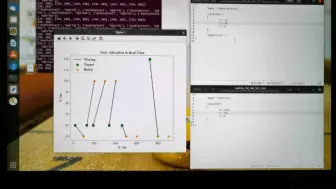
机器人集群的模拟软件初版搭建完成,能够模拟多机器人、多目标的场景,进行机器人集群的任务分配、路径规划,并且可以进行数据导出和后处理。这里用blender做了一…
分布式资源分配在机器人集群中的应用动机讨论
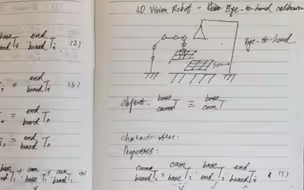
2D视觉机器人的手眼标定流程记录
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
3D视觉机器人的手眼标定流程记录
机器人集群中的隐式协同和显式协同讨论
机器人集群演示-大型障碍物模拟
机器人集群模拟程序-多机器人实时避障和路径规划演示
机器人集群模拟程序简单演示
机器人集群模拟程序-编程演示
机器人集群模拟程序开发-阶段性闲聊-2022年9月
使用3D视觉机器人完成无序抓取的调查报告
机器人集群模拟程序-50台机器人的路径规划和实时避障演示
机器人集群模拟程序介绍-1-动机、目标、功能
3D视觉机器人中手眼标定的精度提升方法记录
机器人集群模拟软件演示-机器人之间的防碰撞功能
机器人集群演示-80台机器人的小队行动
分布式机器人集群的初步讨论
可移动机器人在生物制药领域的应用和思考
简易版机器人集群任务分配模拟平台
简易版机器人集群任务分配模拟平台-2
小型室内机器人调度系统介绍-6-第三版程序实现效果
小型室内机器人调度系统介绍-7-第四版调度数据可视化
小型室内机器人调度系统介绍-5-第二版程序实现方法
RoBIM智能割焊机器人解决方案应用介绍
小型室内机器人调度系统介绍-1-背景和目标
小型室内机器人调度系统介绍-2-调度系统功能
小型室内机器人调度系统介绍-4-程序实现方法和简单测试程序
小型室内机器人调度系统介绍-8-使用Socket完成与机器人的TCP/IP通信
点云配准的ICP算法测试
小型室内机器人调度系统介绍-3-数学方法和应用场景
多智能体系统一致性基础-7-单积分器动力学的一致性
手眼标定自动化的流程思考和讨论
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
使用PCL(Point Cloud Library)进行点云的法线估计
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
多智能体系统一致性基础-3-图矩阵基础
斯坦德物流机器人在中国机器视觉展会的演示
多智能体一致性实验进度跟进-2-包含3个智能体的Perron离散时间系统一致性模拟