V
主页
手眼标定自动化的流程思考和讨论
发布人
关于手眼标定的自动化,做了一点思考,看能不能引入视觉导航的思路
打开封面
下载高清视频
观看高清视频
视频下载器
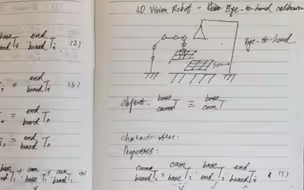
2D视觉机器人的手眼标定流程记录
3D视觉机器人的手眼标定流程记录
3D视觉机器人中手眼标定的精度提升方法记录
遗传算法NSGA-2的基本计算流程讨论
多智能体系统一致性介绍-1-代数图论基础
分布式资源分配在机器人集群中的应用动机讨论
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
气体污染物扩散的思考记录
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
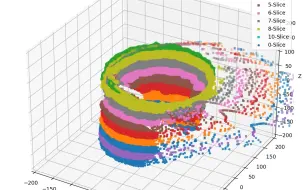
采用3D深度相机和切片方法测量人体体积
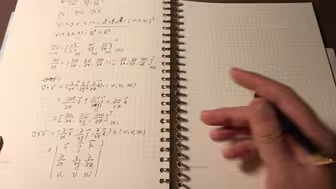
Nabla算符的理解记录
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
多智能体系统一致性基础-2-强连接图特性讨论
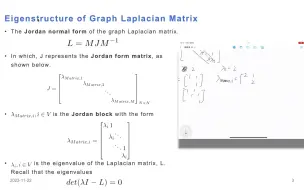
多智能体系统一致性基础-3-图矩阵基础
多智能体系统一致性基础-7-单积分器动力学的一致性
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
分布式机器人集群的初步讨论
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
TeXShop操作流程记录
多智能体系统一致性基础-6-系统一致性定义
点云配准的ICP算法测试
神经网络的简单讨论-简单神经元模型
多智能体系统一致性基础-4-图矩阵基础2
瓦尔拉斯需求函数的求解记录
使用PCL(Point Cloud Library)进行点云的法线估计
使用3D视觉机器人完成无序抓取的调查报告
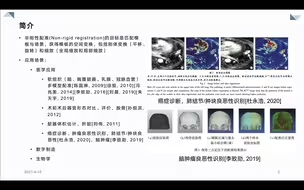
3D点云非刚性配准(Non-rigid Registration)的简要介绍
3D建模师要失业了
深度相机的性能评估
KNN(K近邻)算法的原理介绍
虚拟科技 震撼登场!
一点想法-观测与事实
多智能体系统一致性基础-5-图矩阵基础3
MacTeX下用latexdiff制作修改记录
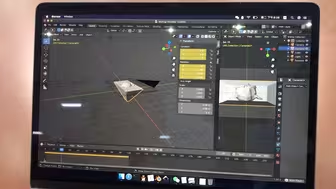
UE5/三渲二CG宫崎骏城堡风格化全流程(值得收藏)
使用3D相机对定位精度指标进行自动数据采集和评估
点云中的多物体识别,使用CGAL库,CM
Pascal的腌笃鲜
多智能体系统一致性基础-9-一阶系统一致下的运动不变特性
多智能体一致性实验进度跟进-1-本机多智能体通信框架搭建完成