V
主页
NeRF训练自己的数据
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
vinsfusion改进添加线特征
r3live语义建图
基于3D GS的SLAM
赛博仙女棒研发成功
基于深度学习特征的长期视觉定位框架
3D GS训练自己的数据
港科大沈邵劼团队开源! 自适应交互模态探索的多模态集成预测和决策
ORBSLAM3_superpoint(cpu运行)
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
GCNv2_SLAM(支持ros运行)
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
1、MetaCam EDU产品介绍及展示!让研发之路,畅通无阻!
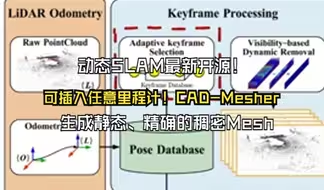
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
AirVO运行KITTI数据集
赛尔最近出了一款风声很大的手持激光扫描仪,今天我们一起测试下赛尔SLAM S10的RTK精度如何吧?#三维激光扫描仪 #SLAM
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
ORBSLAM3+YOLOV8动态剔除+稠密建图
vinsfusion双目稠密重建
大疆livox-mid360室外定位
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
PLVINS运行Euroc数据集
SLAM着色点云精细建模园林石雕!
每天都跑几圈,机器人底盘,室内slam
存档毕设
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”
ORBSLAM3添加线特征
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
搞SLAM算法为什么要学李群和李代数
[SIGGRAPH Asia 2024]重光照高斯泼溅GS^3:Efficient Relighting w/Triple Gaussian Splatting
多视图三维重建技术发展
GPS丢失情况下无人机定位-VIO+VPS
无人机室内自主飞行,和地面站操作
视觉SLAM算法入门必备基础知识
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
重新正常的激光雷达扫图
无人车自主探索建图gazebo仿真