V
主页
京东 11.11 红包
LARVIO在数据集上的表现
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
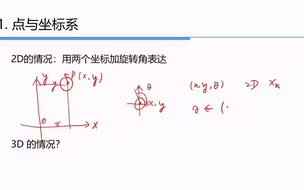
2-1 点与坐标系
5-1 特征点提取与匹配
visual odometry revisited
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
轨道车辆激光LIO测试
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
1-3 视觉SLAM的数学描述
ORB-SLAM3- TUM-VI Monocular-Inertial, room1+slides1+slides2+slides3
反光柱定位算法及自动重定位算法,其计算得出的定位数据在任何时刻都完全不依赖前一次定位数据,成功突破了市面上同类算法需依赖前一次定位数据作为基准的局限。
LARVIO:3相机 +里程计+GPS
【Operation Research】运筹学 - 11: Convex Optimization, Lagrangian, KKT Conditions
“北斗导航与多源增强”学术沙龙(北斗导航篇)
罗斌《基于多源传感器数据融合的动态场景SLAM研究》
【Operation Research】运筹学 - 10: 旅行商问题
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
刘刚-多模多频实时GNSS软件接收机
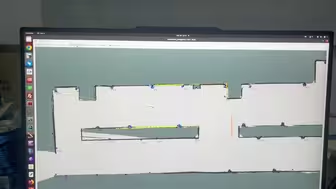
高翔-大规模点云地图的自动化构建
其域创新2024年新品发布会
Robots Learning through Interactions
木吒-视觉里程计和SLAM
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【中际旭创】大A的英伟达,行业绝对龙头,无比稀缺!大A再没有比它更受益于AI的了|价值事务所
【ICRA2021】来自范围和语义分割观察的主动贝叶斯多类别建图
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】3809-基于优化的视觉惯性SLAM与原始GNSS测量紧密耦合
【ICRA2021】基于预测不确定性的深度多视图深度估计
【第二届全国SLAM技术论坛】戴玉超-基于深度学习的多角度几何:从监督学习到无监督学习
【ICRA2021】ENCODE:一个深点云里程计网络
【SLAM】高翔-视觉SLAM十四讲 配套视频
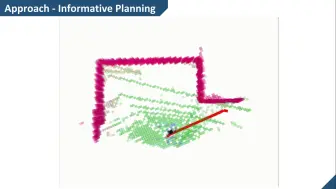
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】Kimera-Multi:分布式多机器人度量语义SLAM系统
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
LIO-SAM with Ouster Lidar OS1-128
【腾讯控股】比茅台未来确定性强得多,无可争议的公认的超级无敌大白马|价值事务所
【ICRA2021】未探索语义环境中移动操作任务的反应式规划
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】VelocityNet:点云序列中用于 3D 对象检测的运动驱动特征聚合
有缘人见