V
主页
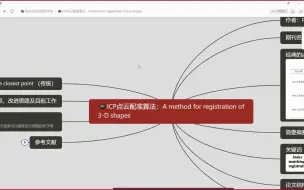
点云配准教程第九讲:彻底弄懂ICP算法(上)
发布人
点云配准交流群入群方式:加我微信TechFlowAI,备注:点云配准加群 由于人数超过限制,只能邀请入群!!!
打开封面
下载高清视频
观看高清视频
视频下载器
目前B站讲的最透彻的3D点云全套教程,包含点云配准、点云分割、点云补全及PointNet算法等核心知识!强烈建议收藏!
B站强推!2023公认最通俗易懂的3D点云教程完整版,点云配准、点云分割、点云补全、点云数据处理及pointnet算法解读,学完之后吊打面试官!计算机视觉|点云
[5分钟点云学习] #02 PointNet 开山之作
三维点云课程 超级详细
基于二维图像特征匹配的粗配准+ICP精配准的三维点云配准
三维点云处理技术和深度学习在点云处理中的应用
点云配准的ICP算法测试
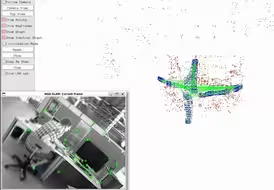
基于ICP点云配准的工件位姿估计-Open3D
点云处理之ICP交互式配准
点云配准教程第二讲:旋转矩阵、旋转向量、欧拉角、四元数
ICP代码讲解及答疑解惑
一个视频讲清楚ICP算法
点云配准算法基础教程来啦!!!
点云配准教程第十讲:彻底弄懂ICP算法(下)
浅显易懂讲算法(5)—点云配准 ICP 算法
激光SLAM前端里程计ICP算法推导和代码演示
规控学习小组分享:自动泊车规控算法分享
点云配准教程第四讲:点云配准的基本数学模型及其SVD求解方法
点云配准教程第八讲:FPFH算法及其c++实现
点云配准教程第六讲:角点与面点的提取与使用
点云配准教程第三讲:空间变换不同表示方式之间的互相转换
ICP-MS测定粮食中痕量元素
点云配准教程第七讲:点云特征描述子概述与PFH算法
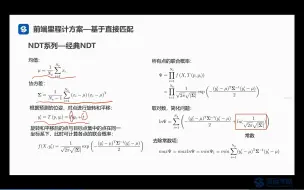
第4节 NDT
ICP算法概述及使用SVD推导
点云配准教程第一讲:点云配准初识
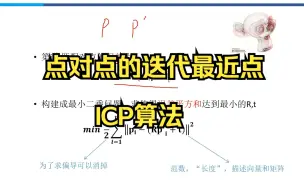
6-8激光里程计-点对点的迭代最近点ICP算法
点云配准教程第五讲:点云关键点概念与ISS关键点详解
RANSAC、ICP算法及其变种一次性打包带走!!!
SLAM领域超实用开源方案汇总
殷鹏教授TRO最新研究详解,面向SLAM 2.0时代的通用地点识别综述
学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法
最强性能的点云配准算法,将Transformer融入点云配准
10月2日组会汇报:ICP算法
slam定位算法工程师必看书籍
大三菜鸡毕设:无需GPU即可实时的高精度动态SLAM[开源]
点云配准第一阶段课程总结,我又回来啦!!!
武大珞珈实验室最新工作!DynaMeshSLAM:基于Mesh的动态视觉SLAMMOT方法
好好利用GitHub,助你学习和科研事半功倍
自动驾驶算法工程师入职五个月的所见所闻所感