V
主页
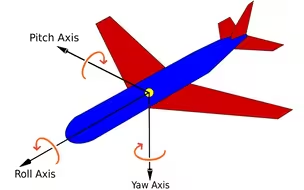
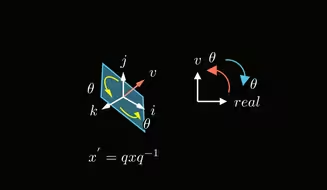
点云配准教程第二讲:旋转矩阵、旋转向量、欧拉角、四元数
发布人
我的公众号:TechFlowAI 自动驾驶与机器人行业交流圈子,第一手讲义分享
打开封面
下载高清视频
观看高清视频
视频下载器
欧拉角的旋转过程
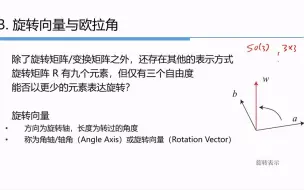
2-3 旋转向量和欧拉角
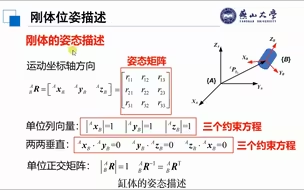
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
点云配准教程第一讲:点云配准初识
形象理解四元数
点云配准教程第四讲:点云配准的基本数学模型及其SVD求解方法
【姿态解算】8:计算欧拉角---用四元数表示刚体姿态
PCL点云处理
点云配准教程第六讲:角点与面点的提取与使用
四元数和三维旋转
第一章 四元数与旋转矩阵——1.5(a) 旋转的四元数表示;应用:imu运动方程的四元数形式与Runge-Kutta积分
点云配准教程第八讲:FPFH算法及其c++实现
【Open3D】三维点云python教程
点云配准教程第三讲:空间变换不同表示方式之间的互相转换
无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵
欧拉角概念的深入理解
B站强推!2023公认最通俗易懂的3D点云教程完整版,点云配准、点云分割、点云补全、点云数据处理及pointnet算法解读,学完之后吊打面试官!计算机视觉|点云
点云配准教程第五讲:点云关键点概念与ISS关键点详解
透彻理解旋转矩阵
点云配准教程第九讲:彻底弄懂ICP算法(上)
三维点云课程 超级详细
第三章:slam中常用的数学基础知识
【ICCV 2023】RegFormer:点云配准新方案!
第二章:编程及编译工具
视觉定位学习小组技术分享:相机成像模型与对极几何
拓展知识!!!欧拉角和四元数的运用
激光定位学习小组技术分享:基于ESKF的传感器融合算法与IMU预积分理论
四元数如何控制物体旋转?
2-2 旋转矩阵
感知学习小组技术分享:浅谈传统识别算法
如何转行成为一名自动驾驶算法工程师
无伤理解欧拉角中的“万向死锁”现象
【强推】深度学习3D点云,最新最热门【mmdetection3D框架】详解!最新视觉任务,强到离谱!
规控学习小组分享:自动泊车规控算法分享
自动驾驶算法工程师入职第四个月的所见所闻所感
自动驾驶算法工程师入职三个月的所见所闻所感
四元数的可视化
slam定位算法工程师必看书籍
【深度教学】姿态解算理论及应用(持续更新)
点云配准算法基础教程来啦!!!