V
主页
京东 11.11 红包
6-8激光里程计-点对点的迭代最近点ICP算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
6-7激光里程计的迭代最近点ICP算法简介
轮式里程计激光里程计视觉里程计区别是什么
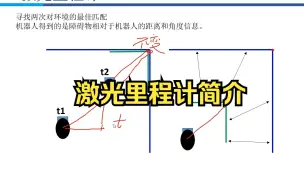
6-6激光里程计简介
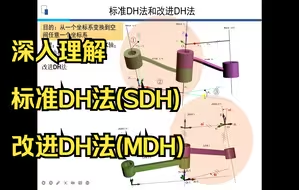
深入理解标准DH法(SDH)和改进DH法(MDH)
6-9视觉里程计简介
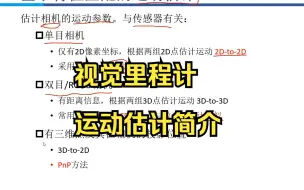
6-13视觉里程计-运动估计简介
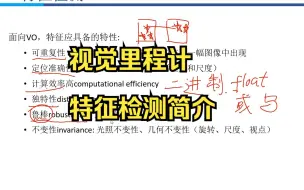
6-10视觉里程计-特征检测简介
FW-max重载爬坡通过性展示
6-11视觉里程计-特征检测ORB算法
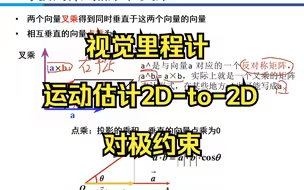
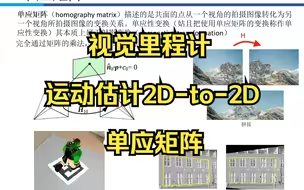
6-15视觉里程计-运动估计2D-to-2D对极约束
6-14视觉里程计-运动估计2D-to-2D-相机基础
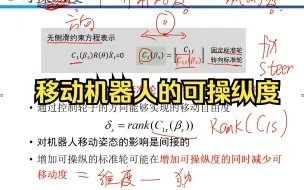
3-27移动机器人的可操纵度
4-13最优路径搜索算法-深度优先法
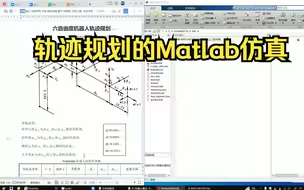
6-13轨迹规划的Matlab仿真
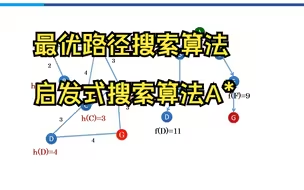
4-16最优路径搜索算法-启发式搜索算法A星
4-18避障规划
MK-mini砖路沟坎
4-15最优路径搜索算法-Dijkstra算法
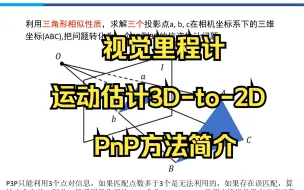
6-17视觉里程计-运动估计3D-to-2D PnP方法简介
4-12最优路径搜索算法
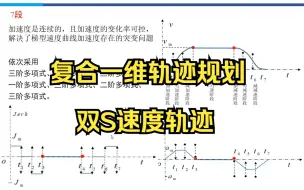
4-30复合一维轨迹规划-双S速度轨迹
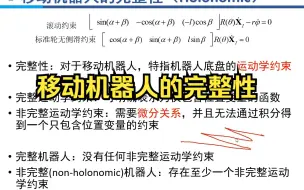
3-29移动机器人的完整性
4-35移动机器人平面运动轨迹规划方法-参数优化法
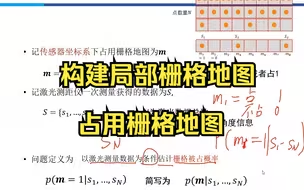
5-9构建局部栅格地图-占用栅格地图
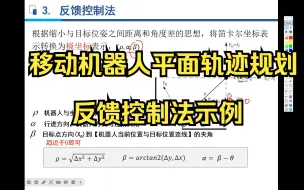
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
FW-max 移动机器人 自动驾驶充电展示
4-3路径规划
4-17最优路径搜索算法-准启发式搜索算法:蚁群算法
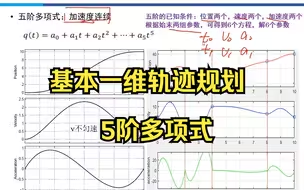
4-27基本一维轨迹规划-5阶
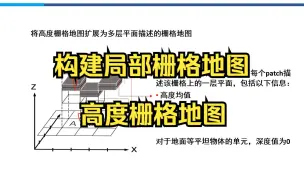
5-10构建局部栅格地图-高度栅格地图
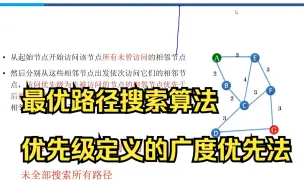
4-14最优路径搜索算法-优先级定义的广度优先法
4-4工作空间与位形空间
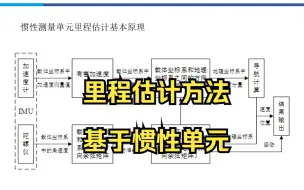
6-5里程估计方法-基于惯性单元
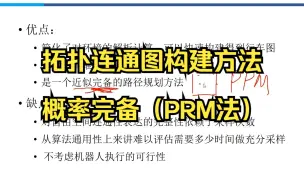
4-9拓扑连通图构建方法--概率完备(PRM法)
6-19视觉里程计总结
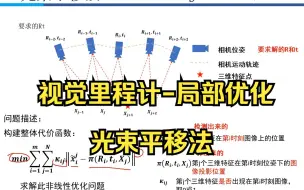
6-18视觉里程计-局部优化-光束平移法
5-2常用环境感知传感器
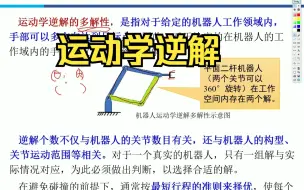
3-11运动学逆解
6-16视觉里程计-运动估计2D-to-2D单应矩阵
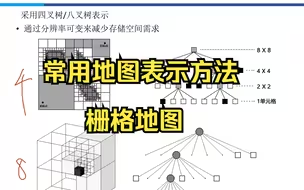
5-4常用地图表示方法-栅格地图