V
主页
ROS 2D导航原理系列(四)|全局路径规划-Dijkstra算法
发布人
ROS 2D系列教程更!新!了! Dijkstra算法 你值得了解
打开封面
下载高清视频
观看高清视频
视频下载器
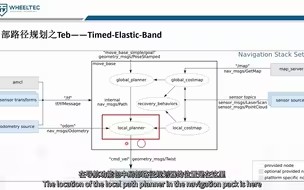
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
ROS 2D导航原理系列(二)|自适应蒙特卡罗定位AMCL
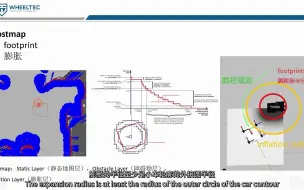
ROS 2D导航原理系列(一)|Costmap
ROS 2D导航原理系列教程合集(WHEELTEC)
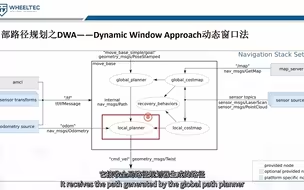
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
ROS 2D导航原理系列(三)|全局路径规划-概述
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
ROS入门系列教程|WHEELTEC
ROS入门系列教程(三)——ROS话题(WHEELTEC)
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
【整整666集】这绝对是B站讲的最全的传感器扫盲合集,从入门到精通,少走99%的弯路!
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解
通过英文ROS wiki快速入门ROS教程(八)|ROS wiki直接跳转方式(以launch为例)
ROS Moveit桌面机械臂进阶视频教程(一)|Urdf标签讲解
ROS2功能系列视频教程 (一)| ROS2小车上手操作
常见的SW操作技巧,让你使用SolidWorks效率翻倍
深度学习系列教程|06训练环境搭建和制作自己的数据集
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
【色彩100集】零基础教你快速掌握色彩基本功,轻松学会色彩搭配!配色原理/色彩搭配/调色技巧
在家作AI,昨天680,一台电脑,操作简单,分享我的接单平台、接单技巧和资源分享,目前经济自由!!
SolidWorks快捷键这样设置,效率提升5倍!
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
我从来不用自己剪视频,因为我会用AI
ROS2入门系列视频教程 (二)| ROS2体系框架
ROS Moveit桌面机械臂进阶视频教程(四)|Move_Group_Interface C++部分函数讲解
手把手教你如何通过STM32与N10激光雷达实现小车跟随
ROS Moveit桌面机械臂进阶视频教程(六)|Moveit_Config参数讲解第二部分
ROS2功能系列视频教程 (二)| ROS2键盘控制
从零开始实现一个球平衡机器人(附源码讲解)
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS教育机器人功能演示(WHEELTEC)
solidworks全套钣金教程!!从零开始学,耗时千余小时开发!
ROS2功能系列视频教程 (九)| ROS2视觉跟随
轮趣科技联合奥比中光推出首款3D视觉机器人开发套件
【B站热搜】这是清华大佬花了三十天整理出来的simulation有限元分析,非常详细非常通俗易懂,建议新手小白收藏下来反复观看。
通过英文ROS wiki快速入门ROS教程(三)|ROS基础入门概念(1)
轮趣科技与科大讯飞、奥比中光联合研发业内首款多模态机器人开发套件-晓
通过英文ROS wiki快速入门ROS教程(六)|使用ROS-tutorials学习话题