V
主页
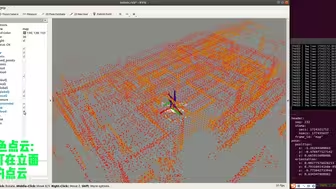
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
激光SLAM的入门讲解视频教程(四)|liosam工程实现和代码模块讲解(上)
激光SLAM的入门讲解视频教程(一)|SLAM简介
MVSGaussian代码讲解
自研:基于 LIO-SAM 魔改和优化的3D定位系统--具备长距离防定位丢失能力,应对动态变化场景
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
激光SLAM的入门讲解视频教程(五)|liosam工程实现和代码模块讲解(下)
第25讲:Egoplanner集群仿真
【三维重建完全可自学教程】2024B站最完整的计算机视觉-3D三维重建教程分享!知名博士通俗易懂的解释,学三维重建真的不难!
隧道里面抡摆锤,暴力SLAM测试!
基于先验地图的通用激光雷达定位框架
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
轮足静态障碍物导航避障
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
视觉SLAM的本质多视图几何
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
vinsfusion改进添加线特征
视觉SLAM半直接法是什么
第24讲:解决Ego在仿真中不能运行的问题
【三维重建】近期进展:从UC-GS、实时高斯到Splatt3R、Spann3R(上)
基于深度学习特征的长期视觉定位框架
赛尔最近出了一款风声很大的手持激光扫描仪,今天我们一起测试下赛尔SLAM S10的RTK精度如何吧?#三维激光扫描仪 #SLAM
视觉SLAM特征点法与直接法的区别是什么
2、MetaCam EDU 产品功能及细节介绍
1、MetaCam EDU产品介绍及展示!让研发之路,畅通无阻!
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
r3live语义建图
ROS2入门系列视频教程 (二)| ROS2体系框架
赛博仙女棒研发成功
LSD-SLAM系统框架解读
视觉SLAM算法入门必备基础知识
ORB-SLAM2系统框架解读
【3D数学】认识欧拉角
手把手教你如何通过STM32与N10激光雷达实现小车避障
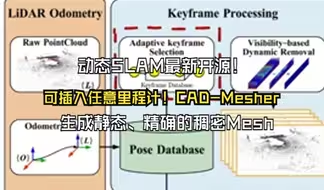
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
重新正常的激光雷达扫图
视觉SLAM算法特征点法详解
GPS丢失情况下无人机定位-VIO+VPS
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
ROS 2D导航原理系列教程合集(WHEELTEC)
多视图三维重建技术发展