V
主页
思岚科技RPLIDAR 系列雷达 X ROS1使用教程(中英字幕)
发布人
ROS作为机器人软件平台,能为异质计算机集群提供类似操作系统的功能。目前,思岚全系列雷达都已经实现了与ROS的兼容,并提供相应的ROS包,让用户基于ROS开发包实现对机器人的开发和集成。
打开封面
下载高清视频
观看高清视频
视频下载器
【教程】思岚科技RPLIDAR X ROS2
思岚科技激光雷达RPLIDAR C1开箱及SDK演示
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
省赛综测学分、奖学金、学ROS,统统拿下
【开源无人车】从零调试一辆PIX无人车
【开源无人车】从零组装一辆开源PIX无人车
【开箱测评】思岚二代TOF雷达RPLIDAR S2开箱实测
MoveIt与Isaac Sim结合使用
使用Isaac Sim和ROS2控制机器狗指南
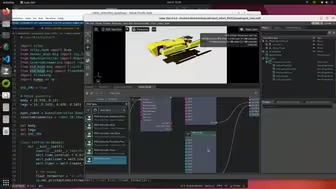
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
【思岚科技 X 智东西 】利用多传感器融合技术解决机器人可靠定位问题
闲置一年的自制ros小车,终于第一次成功利用开源gmapping建图
大咖助阵!诚邀您共襄ROSCon China 2024全球开发者盛会!
基于Gazebo的无人车激光SLAM建图与导航仿真
室外ROS 省赛实录 [速度较慢可以展示]
12步搭建智能机器人: 从设计到AI入门
【开源无人机】ROS无人机编队代码讲解
强推!这可能是导师都不讲的自动驾驶最新版教程,不愧是北航硕士团队分享!3小时就带我跑通了自动驾驶感知融合实战!简直比刷剧还爽!
Isaac Sim和ROS2自主移动机器人(bcr_bot)
【开源无人机】ROS系统中yolo模型处理多摄像头
思岚科技工业级区域监控雷达LPX E3开箱及使用视频
ROS控制 | 小车底盘控制讲解
思岚科技CEO陈士凯对话《浦东新脸谱》栏目,专注机器人自主行走,践行行业发展的每一步
自动驾驶入门技术全栈实战解析-1-感知篇
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
使用Isaac Sim和ROS2实现大田农业机器人
ros系统rcfusion多模态复现
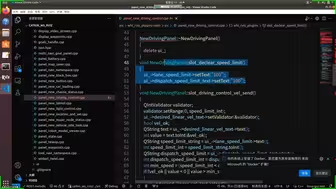
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
端到端机械臂视觉抓取无人配送的场景演示
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
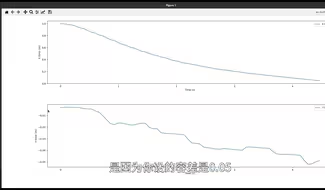
7.2无人机PID参数调试
带激光雷达了!体验DJI Air 3S
【开源无人机】从零调试一架开源无人机M0-F250
NVIDIA Isaac ROS 3.0:重塑机器人未来
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
ROS与STM32通信编程(下)
【天大航模队2024新生培训】第二课:linux基础操作与ROS入门
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境