V
主页
京.东618红包,每天可领3次
LocoMuJoCo:支持宇树人形Unitree G1的机器人仿真库
发布人
仿真平台维护者Firas Al-Hafez今日在X平台宣布,其机器人仿真库LocoMujoco已经支持了最新的宇树人形机器人Unitree G1. 该库支持模仿学习和强化学习。仅仅只需要 pip install loco-mujoco 地址如下: https://github.com/robfiras/loco-mujoco
打开封面
下载高清视频
观看高清视频
视频下载器
Isaacgym一些自建RL环境的演示
ICRA 2024 QRC(四足机器人挑战赛)决赛浙江大学APRIL队实录
日本横滨机器人展2024.5.16(宇树,求之...)
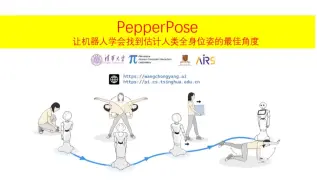
【人类位姿估计的机器人帮手】PepperPose_ Full-Body Pose Estimation with a Companion Robot
【简单尝试】G1: DRL直膝行走,超省电
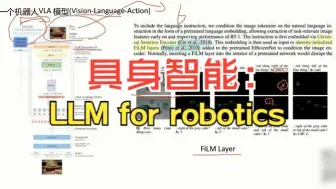
具身智能——LLM for robotics
尝试强化学习_RTX2060负重前行
日本人形机器人Tokyo Robotics灵巧手抓握演示,它可以利用扭矩和阻抗控制来抓取任何形状的物体,无需事先了解物体的大小!
试验不咋成功又不咋失败系列1:继续是MANN的policy,但是,调完之后步态还是不咋好看,流泪了
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
试验成功系列2:基于MANN的policy,改了些东西之后稳定多了(动作还是很丑呢)
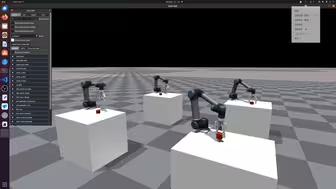
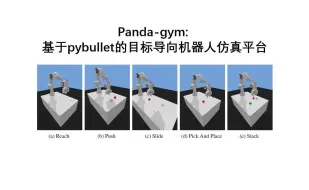
panda-gym:基于pybullet的机器人操作学习库
【更新完毕】MuJoCo 200版本系列教程 (2022)by Pranav A. Bhounsule
利用业鱼时间手搓一只狗子
跑了一些CMU Quad-SDK的Demo
ICRA2024宇树小人形近距离欣赏
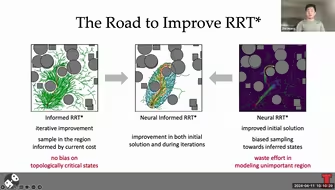
【ICRA 2024】Neural Informed RRT* 使用点云状态表征结合深度学习与椭球约束的路径规划
加州大学圣地亚哥分校的6人组华人团队在宇树仿人机器人H1上的研究
人形机器人第一次直腿行走get!
【pinocchio】运动动力学库入门教程
使用超冗余机械臂(20个自由度)写字符串
宇树科技 G1工程机在ICRA2024
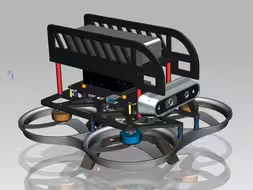
EGO-Planner 小飞机启动~
ICRA2024绳驱灵巧手展示
基启人Amabot人形机器人的躯干结构
我们成功了!把多模态大模型和机械臂结合到一起,效果很惊艳!
在家也能造桌面级双足机器人(哥伦比亚大学硕士课程Robotic Studio)
MJPC的双手任务
RL驱动下的机器人日常训练
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
【Diffusion model】港大腾讯强强联手驯服用于字符控制的扩散概率模型,扩散模型可以在unity实时控制角色运动了?100种运动风格切换实机测试!
ICRA2024的挑战赛,波士顿动力+宇树
训练的四足为何跪着跑
新型7自由度3D打印机械臂腕部结构
机械臂接入GPT4o大模型,秒变多模态AI贾维斯
宇树发布 | Unitree G1 人形智能体 AI化身 ¥9.9万元起