V
主页
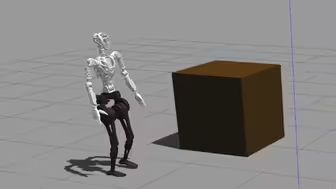
训练的四足为何跪着跑
发布人
跑的是这个项目,https://github.com/aCodeDog/legged-robots-manipulation/tree/master, 可以成功运行预训练模型,并且效果非常好。但是使用项目的代码,在未对任何参数进行修改的情况下进行训练的出的效果却很奇怪。机器人都无法站立,不知道是什么原因。求助大佬们。 还有,这个视频是在使用env.gym.write_viewer_image_to_file获得图片的,然后再使用cv2转成视频,请问大家是怎么直接在isaac gym里获得录制视频的呢?
打开封面
下载高清视频
观看高清视频
视频下载器
【人形机器人仿真】这走路姿势比我都标准
【上新】SIGMA free ++++++++++版发布啦
四足机器人沙滩行走
四足机器人控制器分享(webots+matlab)
自主巡航爬楼梯穿越复杂地形的四足机器狗来了
25kg四足机器人慢步态行走调试
预告 | 跨入多彩科技新境界,展现行业能力新高度!探索四足机器人瓦力WALL·E 智能技术在行业内的精准应用!
巴掌级腿轮的第一动
2024智源大会 特邀报告 Reinforcement Learning with Large Datasets
国产四足机器狗逐际动力W1全新升级为轮足机器人。#机器狗 #机器人 #轮足机器人 #逐际动力 #机器人送快递
#轮足机器人 #TITA #轮腿式机器人 #火鸡兄弟 #本末科技
四足机器人瓦力WALL·E越障性能展示
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
08大模型全栈-强化学习01-RLHF前言传统强化学习
Go2使用教学08-笨笨狗
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
秒杀波士顿动力Atlas机器人 清华叉院训练强化学习策略,小成本让H1人形机器人完成跑酷高难度动作
Go2开发教学05-底层服务接口
10大模型全栈-强化学习03-RLHF原理以及流程介绍
【通用】人形机器人RL策略Gazebo二次仿真框架
人工智能机器人一体化假肢、义肢、人造机器腿来啦 | 强化学习 义肢机器人大模型#人形机器人
4K光追的强化学习——IsaacSimLab(Orbit)测试
人形机器人 手指机械结构
Go2使用教学13-牵引步态
09大模型全栈-强化学习02-RLHF前言LLM强化学习
Go2使用教学12-前沿模式
Go2使用教学04-标定教程
抓个电控半天从零速通板凳,串级反了还能跑
林下空间高精度实时三维点云建模,四足机器人瓦力功能展现
来自美国加州理工学院的多模式可变形陆空两栖机器人Morphobot #飞行机器人 #四足机器人 #morphobot #变形机器人
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
Go2使用教学03-OTA固件升级
【自制】我开发了一个通用机器人大脑!【硬核】
【强化学习入门】9.3 Policy Gradient 算法概述+实验设计
请问强化学习的损失是上升的怎么回事
同济大佬倾力打造!三小时带你掌握【强化学习】基础原理及环境配置搭建,小白也能轻松掌握的通俗课程!
双足机器人步态生成 MATLAB and Simulink
B站首推!不愧是李宏毅老师讲的【强化学习】简直太详细!!!2024公认最通俗易懂的【强化学习教程】小白也能信手拈来(人工智能|机器学习|深度学习|强化学习)
Go2开发教学04-高层运动服务接口
Go2使用教学05-运动姿态介绍