V
主页
京东 11.11 红包
30.行为克隆
发布人
https://www.boyuai.com/elites/course/xVqhU42F5IDky94x
打开封面
下载高清视频
观看高清视频
视频下载器
1.强化学习简介
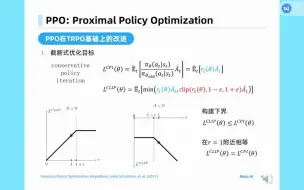
25.PPO
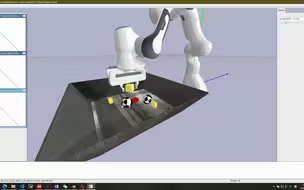
UR5e抓取测试
37.多智能体强化学习
机器人强化学习 DDPG-6DOF-Lift
机器人开门 - science robotics - 日本早稻田大学
Hierarchical Diffusion Policy 实机实验
31.逆强化学习
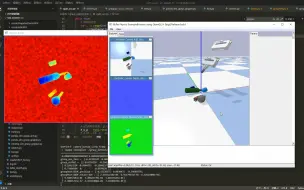
使用pybullet进行仿真抓取
使用真实ur机械臂在Robosuite环境中收集轨迹
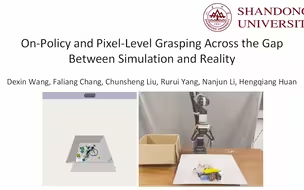
on-policy 机器人抓取,性能超越Dex-Net
39.多智能体强化学习进阶
GraspNet仿真抓取测试
小到U盘,大到石头,万物可抓的平面抓取检测算法
3.马尔科夫决策过程
会飞的自行车!自行车强化学习跳跃
32.生成式对抗模仿学习
6DOF抓取方法graspnet-1Billion测试
2.探索与利用
22.深度Q网络
基于扩散模型的可变形物体操作(布料展平)
【科普报告视频分享】西安交通大学兰旭光教授:基于视觉推理与学习的机器人自主作业
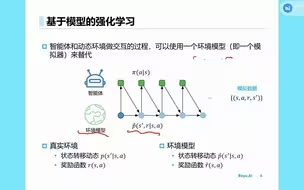
5.基于模型的强化学习
38多智能体强化学习入门
新算法的抓取演示
9.重要性采样
34.模型预测控制
pairwise motion piror与原版amp高速运动对比效果
10.时序差分学习
【论文代码复现122】基于强化学习的路径规划问题||强化学习和群智能优化算法有什么区别
29.模仿学习
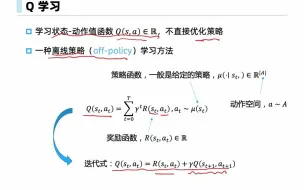
12.Q学习算法及其收敛性
使用spacemouse遥控机械臂实现物体操作
pybullet仿真抓取
21.深度强化学习
40.离线强化学习
23.A3C
6.蒙特卡罗方法
在IsaacLab中的UnitreeA1上重放AMP动捕数据
“抓娃娃机” 2.0