V
主页
基于强化学习的机器人控制系统设计 - MATLAB&Simulink机器人与人工智能专题线上技术研讨会
发布人
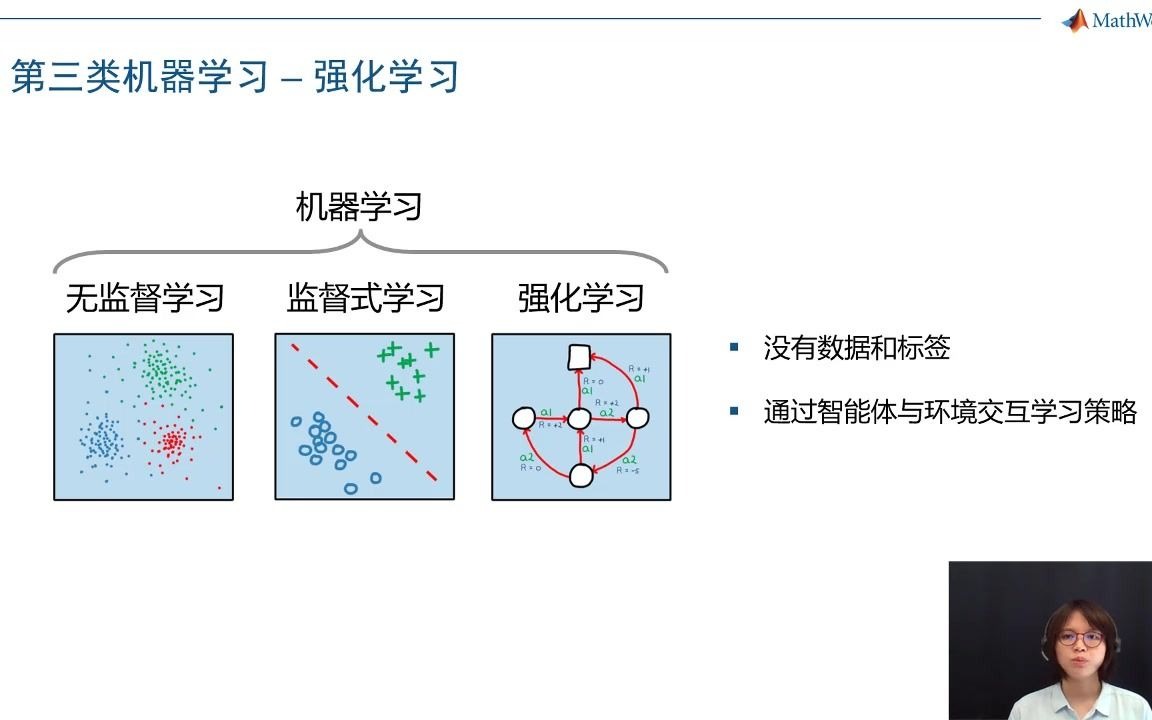
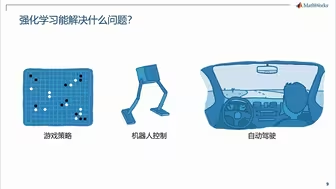
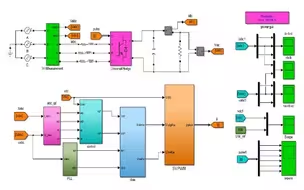
通过强化学习,您可以在没有标注数据的情况下,使用深度神经网络解决复杂控制问题。学习过程通过对目标系统的多次仿真实现。生成的仿真数据用于训练基于深度神经网络的智能体策略,从而取代传统的控制系统。 本演讲以四足机器人行走控制为例,介绍MATLAB和Simulink强化学习工作流,包括怎样设置环境模型,定义策略结构,智能体的训练与验证,通过自动代码生成部署策略函数,以及如何在桌面环境下,结合Simulink环境模型验证策略的代码功能。
打开封面
下载高清视频
观看高清视频
视频下载器
经典内模估计+强化学习,四足机器人训练一小时,即可穿越任意地形
(完结) 完全零基础利用Matlab实现强化学习
四足机器人鲁棒&高速移动的强化学习控制器
强化学习:当机器学习遇上控制理论(1)
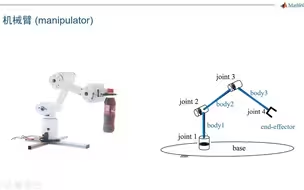
用MATLAB设计机械臂算法 - MATLAB&Simulink机器人与人工智能专题线上技术研讨会
快被强化学习劝退了
【2019-2020完整合集】【官方】 MATLAB & Simulink 小迈步系列课程 人工智能/深度学习/系统仿真/行业规范
【一区顶刊复现】自适应强化学习机械臂固定时间轨迹跟踪控制(输入饱和不确定)
【一区论文复现】自适应强化学习机械臂控制
无痛利用MATLAB实现所有Actor-Critic类强化学习方法
灌水新方向 偏好强化学习概述
04 训练走路的机器人-强化学习
基于强化学习的机器人控制策略
MATLAB深入浅出强化学习 – 从零起步玩转倒立摆
基于深度强化学习的机器人自主导航
【强化学习】深入阐述强化学习与最优控制(双语字幕)
四足机器人强化学习多步态控制
深度强化学习:用于学习控制的神经网络(2)
【研究生必看】MATLAB机器学习与深度学习及其实现,这是我见过最强大的MATLAB课程!
【Matlab/Simulink仿真】MATLAB Simulink仿真搭建及代码生成技术
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
MATLAB基于强化学习的机器人控制系统设计
【官方自制】 Simulink 基础入门系列(全7P)
利用Matlab中的环境模板创建强化学习环境
【强化学习|机器人|部署】sim2real主流方法介绍(共四篇论文)
深度强化学习与多智能体强化学习 第一课
创建 Simulink 强化学习环境和训练代理演练
抄国外开源代码用国外仿真器Isaac Gym训练机器人
MATLAB深度强化学习_Deep Q Network(DQN)
【巅峰之作】使用Matlab实现深度学习!强力推荐给你!
使用强化学习技术训练的神经网络控制四旋翼飞行器的方法
这可能是b站最全的【MATLAB神经网络和优化算法】教程!68讲全!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
小车倒立摆最优控制教程 - Part4 利用LSTM神经网络学习NMPC控制器实现实时控制
【官方中字】 工程师谈强化学习 | 深度学习之强化学习 MATLAB&Simulink
使用深度学习实现自主系统环境感知 - MATLAB&Simulink机器人与人工智能专题线上技术研讨会
7-2机器人控制系统的基本结构
不愧是李宏毅老师讲的【强化学习】简直太详细!!!导师不教你的,李宏毅老师亲自教你,这还不赶紧学起来!!!-人工智能/强化算法/机器学习
【双语字幕】基于强化学习的机械臂控制(Matlab强化学习工具箱)
[机器人精选]强化学习控制的双足机器人