V
主页
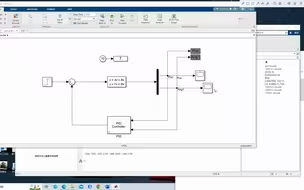
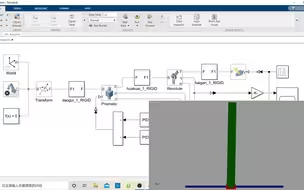
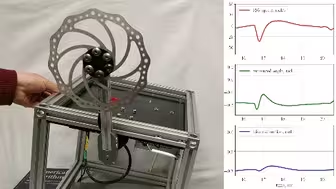
小车倒立摆最优控制教程 - Part4 利用LSTM神经网络学习NMPC控制器实现实时控制
发布人
视频全部原创。这期是小车倒立摆最优控制这个系列第四期视频,在NMPC基础上,通过监督学习以及神经网络训练回归模型以模仿NMPC运作,从而实现替代NMPC和实时控制。 Github开源仿真文件: https://github.com/junhengl/Cart_Pole_Simulink.git
打开封面
下载高清视频
观看高清视频
视频下载器
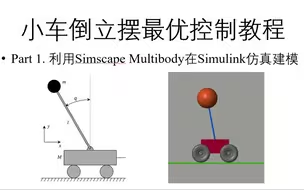
小车倒立摆最优控制教程 - Part1 Simulink Simscape Multibody仿真建模
Hector人形机器人运动控制开源仿真Simulink Simscape & MPC - 1. 简单上手介绍
手把手带你实现MTALAB/simulink的模糊PID控制器(与传统PID做对比)
MPC and Machine Learning
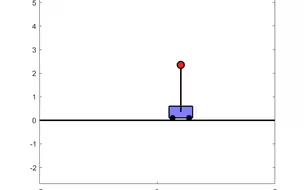
倒立摆控制仿真
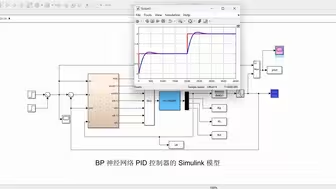
基于BP神经网络的自适应PID控制器设计、自适应PID控制
基于RBF神经网络的自适应控制器simulink建模与仿真
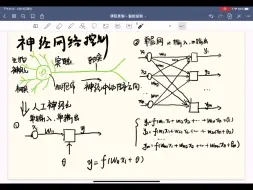
智能控制-神经网络概述
倒立摆PID控制
(RBF_PID)RBF神经网络优化PID的详细讲解过程(含Matlab代码和Simulink)
你还在用PID?MPC模型预测控制,从公式到代码!
BP神经网络PID控制器的S函数实现仿真模型
LQR倒立摆 从建模到控制 零基础都能复现
小车倒立摆最优控制教程 - Part3 NMPC非线性模型预测控制以及在Simulink Simscape仿真验证
matlab 单级倒立摆的神经网络控制
小车倒立摆的仿真
Hector人形机器人开源仿真ROS+Gazebo/MPC运动控制
基于模糊控制算法的倒立摆控制系统matlab仿真
这可能是b站最全的【MATLAB神经网络和优化算法】教程!68讲全!大佬带你入门!简单易懂,手把手带你走进AI人工智能世界!
Matlab倒立摆仿真
小车倒立摆的simscape仿真+讲解版
毕业设计-倒立摆的神经网络控制
课程1-倒立摆优化控制问题的理解
PID、LQR、MPC实时控制倒立摆仿真对比
【机器人控制】机器人机械臂任务空间自适应神经网络控制
神经网络无人机自适应控制
基于强化学习的机器人控制系统设计 - MATLAB&Simulink机器人与人工智能专题线上技术研讨会
看到一个国外的自适应倒立摆,有人知道算法是什么吗?
从模型预测控制到强化学习-2:非线性MPC的求解与应用(PPT高清版)
智能控制(26讲)-中南大学-蔡自兴
BP神经网络原理及编程实现
基于非线性模型预测控制的目标跟踪约束 NMPC matlab无人机算法
Q-learning强化学习算法实现倒立摆控制
【MPC模型预测控制器】1_最优化控制和基本概念
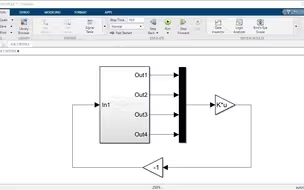
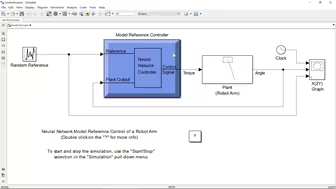
Simulink-神经网络控制系统-模块演示
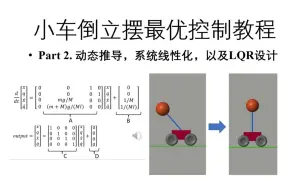
小车倒立摆最优控制教程 - Part2 动态推导,LQR控制器设计以及在Simulink Simscape仿真验证
论文分享 - 让我吃惊的神经网络控制器应用
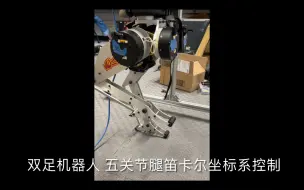
测试一下双足机器人五关节机械腿cartesian control 3d摆动控制
狗子站起来了! 双轮足机器人控制仿真 simscape multibody
跳出课本看LQR控制,从公式到代码!