V
主页
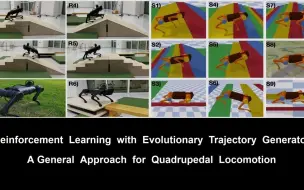
四足机器人鲁棒&高速移动的强化学习控制器
发布人
Learning Robust and Agile Legged Locomotion Using Adversarial Motion Priors DOI: 10.1109/LRA.2023.3290509 强化学习(RL)逐渐成为AI在机器人领域的重要工具。然而,RL在足式机器人上仍未实现全面普及,部分原因归结于RL控制器的安全性和可控性较差,“炼丹师”难以确定和约束控制器的最终行为,这也是大部分RL控制器展现出抖动,不自然的主要原因。 本项工作从一定程度上解决了强化学习的不可控性。实验结果证明,通过RL训练的控制器在尽情发挥其卓越性能的前提下,同样可以具有类似传统优化方法一样的自然步态行为。 希望本项工作能为RL在足式机器人上的应用提供一个baseline。未来,足式机器人应当在复杂多变的环境中发挥其应用价值,而非在实验室的理想环境中作为摆设。
打开封面
下载高清视频
观看高清视频
视频下载器
经典内模估计+强化学习,四足机器人训练一小时,即可穿越任意地形
强化学习:当机器学习遇上控制理论(1)
ROS暑期学校-机器狗强化学习运动控制(云深处+CANN)
四足机器人强化学习之路
【四足机器人】并行强化学习调参 MPC
Unitree 2023 ROS暑期学校课程视频01-搭建Gazebo仿真环境玩转四足机器人(上)
强化学习轮足机器人控制器
比深度学习还“恐怖”的技术是什么?有请“强化学习”登场!
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
【开源】宇树Go2强化学习部署Demo - walk-these-ways-go2
PaddleRobotics开源新算法!一套算法解决四足机器人多地形行走难题
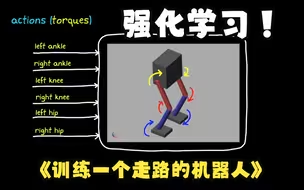
04 训练走路的机器人-强化学习
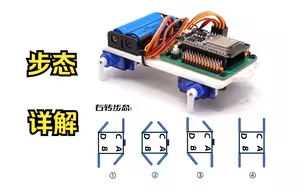
【步态详解】人人都可制作的WiFi遥控迷你四足机器人
机器人强化学习再无环境问题-傻瓜式docker配置脚本
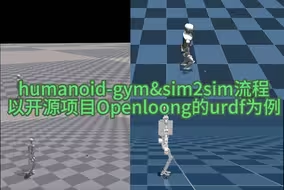
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
【Isaac Gym】四足&双足-强化学习训练效果
Contact-Implicit MPC四足机器人双足倒立与行走
四足机器人强化学习sim to real(walk these ways)
基于Isaac Gym的四足机器狗强化学习控制翻越梅花桩
【开源】强化学习sim to sim
强化学习运动控制 | 云深处 2024 ROS 暑期学校
DeeperMimic:(基于实时动画的)四足机器人多技能控制
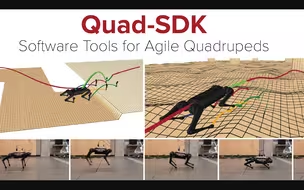
开源敏捷四足机器人运动软件框架Quad-SDK|2022 ICRA【卡内基梅隆大学】
【强化学习|机器人|部署】sim2real主流方法介绍(共四篇论文)
unitree b1/a1四足机器人纯MPC控制gazebo仿真,验证学习过程中MPC、状态估计和姿态估计
四足机器人纯位置控制gazebo仿真,验证学习过程中仿真控制、运动学、FSM和步态相关
[新作预告]四足机器人强化学习盲爬楼梯
四足机器人强化学习鲁棒运动
四足机器人感知爬楼梯、高台
她的强化学习模型终于收敛了
山东大学机器人中心电动腿足组 | 基于深度强化学习的四足机器人多技能稳定学习
赛博宠物|一只四足机器狗的诞生【开源】
不愧是李宏毅老师讲的【强化学习】简直太详细!!!导师不教你的,李宏毅老师亲自教你,这还不赶紧学起来!!!-人工智能/强化算法/机器学习
基于强化学习的机器人控制策略
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
开源!ROS四足机器狗PuppyPi,基于树莓派开发,AI视觉灵动登场!
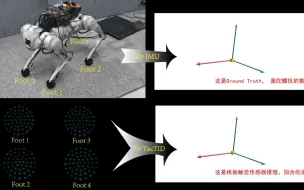
四足机器人足部触觉感知系统-国庆快乐
深度强化学习训练平衡步兵机器人开源
基于强化学习的机器人控制系统设计 - MATLAB&Simulink机器人与人工智能专题线上技术研讨会
【2024ROBOCON】我们是季军!| 华科四足二队参赛寄录