V
主页
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
发布人
来自UCSD和MIT的华人团队开发了名为Open-TeleVision的沉浸式远程操作系统。该系统通过头显设备如Apple Vision,实现对机器人的远程控制,即使相隔3000英里。操作者的动作能精确镜像到机器人上,创造出沉浸式体验。系统支持多种设备控制,有助于收集机器人学习所需的真实数据,推动领域发展。 标题:Open-TeleVision: Teleoperation with Immersive Active Visual Feedback 链接:https://arxiv.org/html/2407.01512v1
打开封面
下载高清视频
观看高清视频
视频下载器
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
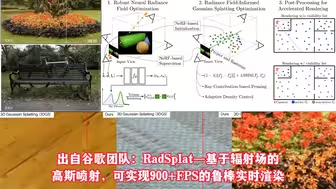
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
移动机器人运动规划
与人工智能相关的十大就业岗位,你最想踏入的是哪一个
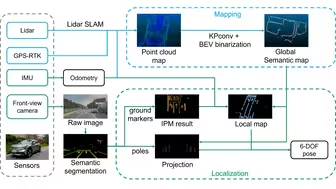
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
继3D高斯抛雪球法之后,4D高斯抛雪球模型问世,单视图视频也能快速生成动态3D对象了
AI口中的小潮院长竟然是这样的?!.....
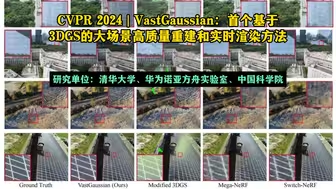
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
比啃书效果好多了!南京大学周志华教授的《西瓜书》从零解读!终于出视频教程了!!草履虫都能看懂!
GaussianPro:具有渐进传播的3D高斯泼溅,该方法在Waymo数据集上明显超越了3DGS
【Proof-Trivial】数学视角下的Transformer【MIT数学系-Philippe Rigollett】
闭环 SOTA | 首个基于MLLM的自动驾驶规划系统,性能高,Token少!
近日,一段机器狗巡山的视频被全网疯传!
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
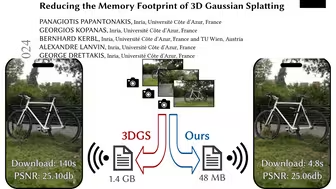
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
不愧是李宏毅!入门到精通一口气讲透CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络算法!简直不要太爽!
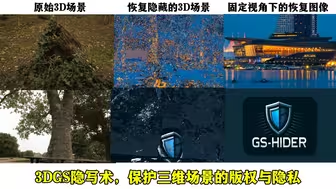
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
杜克大学《AI产品管理(机器学习基础、机器学习项目、AI产品的人为因素)|AI Product Management》中英字幕
CVPR2024 | 一统所有目标感知任务,华科&字节提出感知模型GLEE,一次性解决图像和视频中的几乎所有目标感知任务
【多模态+大模型+知识图谱】2024完整版:这绝对是B站最全的教程,论文创新点终于解决了!——人工智能/深度学习/aigc/计算机视觉
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
基于深度学习的物体检测
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
【MATLAB神经网络和优化算法】只需要花三个小时即可学会,从入门到成神!能听懂人话就绝对能学会!大佬教你轻松入门-人工智能丨MATLAB丨神经网络丨机器学习
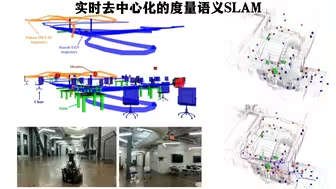
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
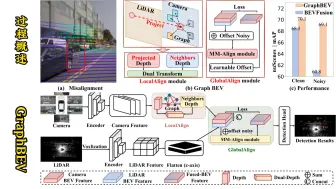
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
冒死上传!200集机器学习算法付费教程!一口气学完线性回归、逻辑回归、神经网络、KNN、决策树、集成算法、聚类算法、SVM支持向量机、朴素贝叶斯等十大必备算法!
【因果机器学习】不愧是MIT大佬主讲的 6.S091课程!因果关系、因果表征学习、因果结构学习、政策评估
基于神经辐射场的实时稀疏视觉里程计NeRF-VO
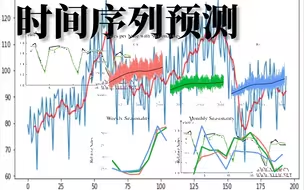
人生苦短,博导半天就教会了我【时间序列预测】!国内顶尖学府北大强推的 LSTM+Informer时间序列预测源码解读+时间序列airma模型—pandas/机器
PETR—作分享:基于位置编码的BEV感知范式
移动机器人运动规划之Quadrotor states
3D Gaussian Splatting再进化,即使是模糊的图像也可以渲染出高保真的3D场景了。
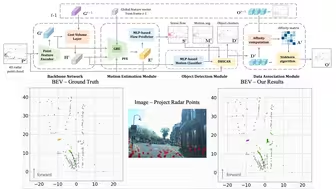
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
ICLR'24|GLiDE:通过反事 实扰动将语言计划植入演示,MIT让机器人掌握"常识",自主完成复杂家务