V
主页
果蝇无人机?用翅膀飞起来的无人机来了!
发布人
仿果蝇无人机——DelFly Nimble,通过拍打翅膀飞行,长为33厘米,重29克。在IMAV 2018室内竞赛中还获得“最具创新性设计”奖,登上了《Science Robotics》的封面。它的续航能力飞行超过1公里,并能够携带4克的额外有效负载。
打开封面
下载高清视频
观看高清视频
视频下载器
御三在演示模式下是真的帅(附方法)
无人机定位与导航
催眠成机器人
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
大疆neo禁飞区能飞吗?能。
第十一期智能无人机线下实训精彩回顾
机器人替你做家务,叠衣倒茶扔垃圾,李飞飞团队新作火了
无人机到手4 小时喜提炸机
再临!委托!谍报!四射!虹幻!
第十二期《智能无人机:从硬件到技术实战》
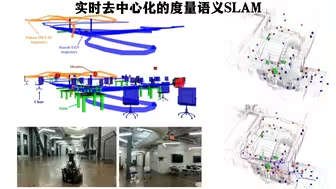
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
大疆neo拆解对比mini4pro核心板的o4图传
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
被国产机器人硬控三分钟:非洲记者中文寒暄,机器人双语热聊
浙江大学邹俊/唐威 Science子刊封面:仿生:利用仿生学设计的自适应软体一体化夹持器实现强大的无人机操作能力
TSLAM-3D-mid360室内定位无人机 3Dslam 桥梁巡检 室内巡检 觅道MID-360激光雷达建模
EPFL羽毛无人机改进版来了:能如同猛禽般翱翔天空
ICRA'24 | FCMW:"四旋翼无人机的智能失控预警":FCMW助力无人机提升飞行安全性。
国际无人机编舞比赛【第一名作品展示】
IROS 2020【最佳论文奖】机器人也能“甩笔”,拥有触觉分析能力
【具身智能】有灵魂的机器人:都有啥?怎么弄?咋搞钱?
会飞的快递员!无人机集群送货上门
来自中国科学院自动化所的团队,首次提出了一种名为 Drive-WM的全新多视图世界模型
多模态信息感知的SLAM | 吴毅红
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
巴掌大比手机还轻的无人机用起来怎么样?DJI NEO体验评测
让每一个会用梯形图的电气工程师都可以自己搞四六关节机器人的运动控制…
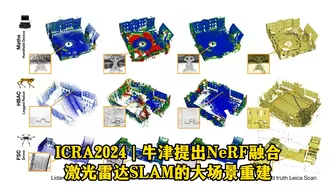
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
【开源无人机】从零调试一架开源无人机
李飞飞团队最新开源ReKep:让机器人具备空间智能,还能整合GPT-4o!
视觉SLAM开源代码论文带读(DSO)
视觉SLAM开源代码论文带读(ORB_SLAM2)
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
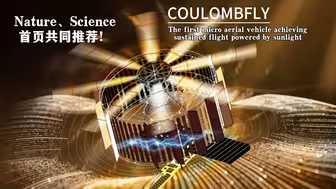
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
全网炸裂!NEO机器人原型曝光,网友惊呼:这货不是机器人,是人!
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
乐高大桥变形机器人
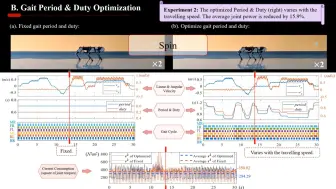
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
魔幻组合:悟空+GoPro微距镜头+avata2穿越机
视觉导航:从状态估计到运动规划