V
主页
浙江工业大学INNO-MATCH EXPO参展产品
发布人
我的深度合作者浙江工业大学机器人软体机器人实验室INNO-MATCH EXPO参展产品 商业学术合作请联系我~
打开封面
下载高清视频
观看高清视频
视频下载器
#我们组的连续体机器人#
各向异性材料软体机器人的设计和模拟
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
使用有限元方法仿真对软体机器人的运动建模和操纵控制
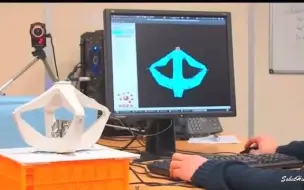
基于柔性脊柱的可变形机械手的设计实验与控制
软体蛇形机器人概念设计性的人机交互尝试
基于有限元模型的蛇形机器人轨迹追踪控制
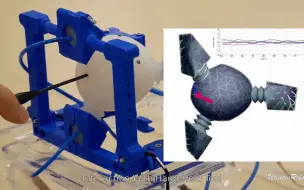
用于软机器人中的力和形状估计的基于有限元模型的传感器方法
基于有限元法的软体蛇形机器人非线性控制器
SOFA Framework 软体机器人建模起步教程
使用SOFA Framework模拟哈佛多步态软体机器人
Sofia步行机器人的有限元仿真与实验实现
基于实时有限元法的弹性软机器人控制(我们课题组元老之作)
哈佛大学软体机器人工具箱介绍
具有刚性椎骨的连续机器人有限元准静态建模和控制的域分解方法
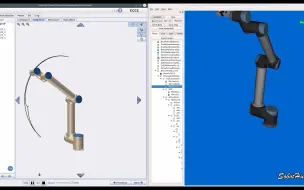
基于有限元分析方法的连续体机器人的运动学和闭环控制
SOFA Framework和ROS的连接使用
在SOFA Framework中训练神经网络以控制软体三脚架平台
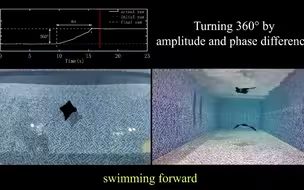
西工大仿生蝠鲼团队1m翼展蝠鲼样机实验
SOFA Framework 软体机器人模拟器 Demo 1
软体机器人学习爬行:一个基于有限元模拟的优化框架的设计与控制方法
使用SOFA Framework对软体机器人模拟的总体思路
一些精妙的 Origami 折纸结构
软体机器人基于模型控制处理接触问题(模型实时控制)
软体蛇形机器人的有限元建模增益调度控制
用于机器人控制的逆实时有限元模拟:灵活的针头插入可变形组织
灵巧手运动控制
降低机器人成本,清华大学推出4电机驱动9个关节的多指灵巧手
小小挑战,FTP灵巧手轻松“拿捏”!
灵巧手遥操作
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
基于cosserat模型的滚动时域估计和模型估计控制
灵巧手第一版V0.1
灵巧手抓取
灵巧手遥操作
Nature communications 可受控快速连续转向跳跃的无腿软体机器人 (重庆大学机械工程学院陈锐老师团队)
基于有限元分析建模和优化框架下的处理软体机器人接触问题
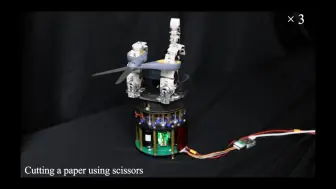
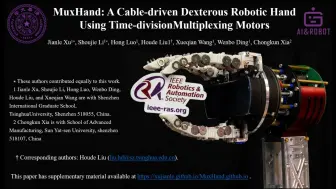
MuxHand-多电机复用的绳驱三指灵巧手
人工耳蜗手术的有限元方法数值模拟
中国仿生机器人公司 EX机器人(EX Robot)