V
主页
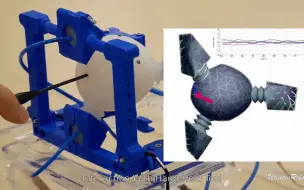
软体机器人基于模型控制处理接触问题(模型实时控制)
发布人
这是我们课题组E. Coevoet的工作(Optimization-based inverse model of Soft Robots with Contact Handling),在有限元模型(逆模型)下将软体机器人接触问题转化为优化问题处理。这个视频demo不是投稿时的视频展示,是后续Christian做的补充展示。Paper链接送上: https://hal.inria.fr/hal-01500912/file/RAL2017.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
使用SOFA Framework对软体机器人模拟的总体思路
使用有限元方法仿真对软体机器人的运动建模和操纵控制
#我们组的连续体机器人#
各向异性材料软体机器人的设计和模拟
SOFA Framework 软体机器人建模起步教程
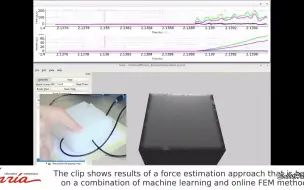
用于软机器人中的力和形状估计的基于有限元模型的传感器方法
基于有限元分析对软体机器人进行几何形状优化
基于柔性脊柱的可变形机械手的设计实验与控制
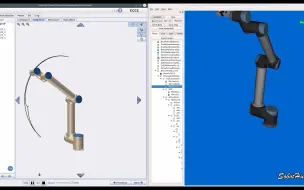
基于有限元分析方法的连续体机器人的运动学和闭环控制
用于机器人控制的逆实时有限元模拟:灵活的针头插入可变形组织
基于有限元分析建模和优化框架下的处理软体机器人接触问题
SOFA Framework 软体机器人模拟器 Demo 1
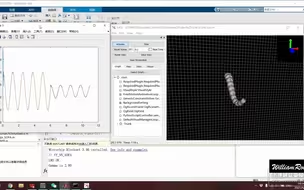
使用SOFA Framework模拟哈佛多步态软体机器人
Sofia步行机器人的有限元仿真与实验实现
#你看过软体机器人玩迷宫游戏么#
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
基于实时有限元法的弹性软机器人控制(我们课题组元老之作)
软体抓手的自动协同设计和抓取控制策略
模拟基于气流测量的新型软机械传感器
软体机器人学习爬行:一个基于有限元模拟的优化框架的设计与控制方法
SOFA Framework和ROS的连接使用
SOFA Framework与Matlab交互模拟(基于有限元方法控制器设计)
浙江工业大学INNO-MATCH EXPO参展产品
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
软体蛇形机器人的有限元建模增益调度控制
基于cosserat模型的滚动时域估计和模型估计控制
在有限元方法框架下基于视觉感知作用在软机器人上的所受外力
哈佛大学软体机器人工具箱介绍
SOFA Framework和Unity3D的结合
软体蛇形机器人概念设计性的人机交互尝试
具有刚性椎骨的连续机器人有限元准静态建模和控制的域分解方法
基于有限元模型的蛇形机器人轨迹追踪控制
人工耳蜗手术的有限元方法数值模拟
基于有限元法的软体蛇形机器人非线性控制器
在SOFA Framework中训练神经网络以控制软体三脚架平台
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):纺织硅胶混合传感器教程(Textile Silicone Hybrid Sensor)
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):SDM手指教程 (SDM Finger Tutorial)
当魔术遇上软体机器人会发生什么?
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):气动腕带教程(Pneumatic Wrist Brace Tutorial)
柔性机构学几个热点研究方向(up主持续更新加强版 建议收藏)