V
主页
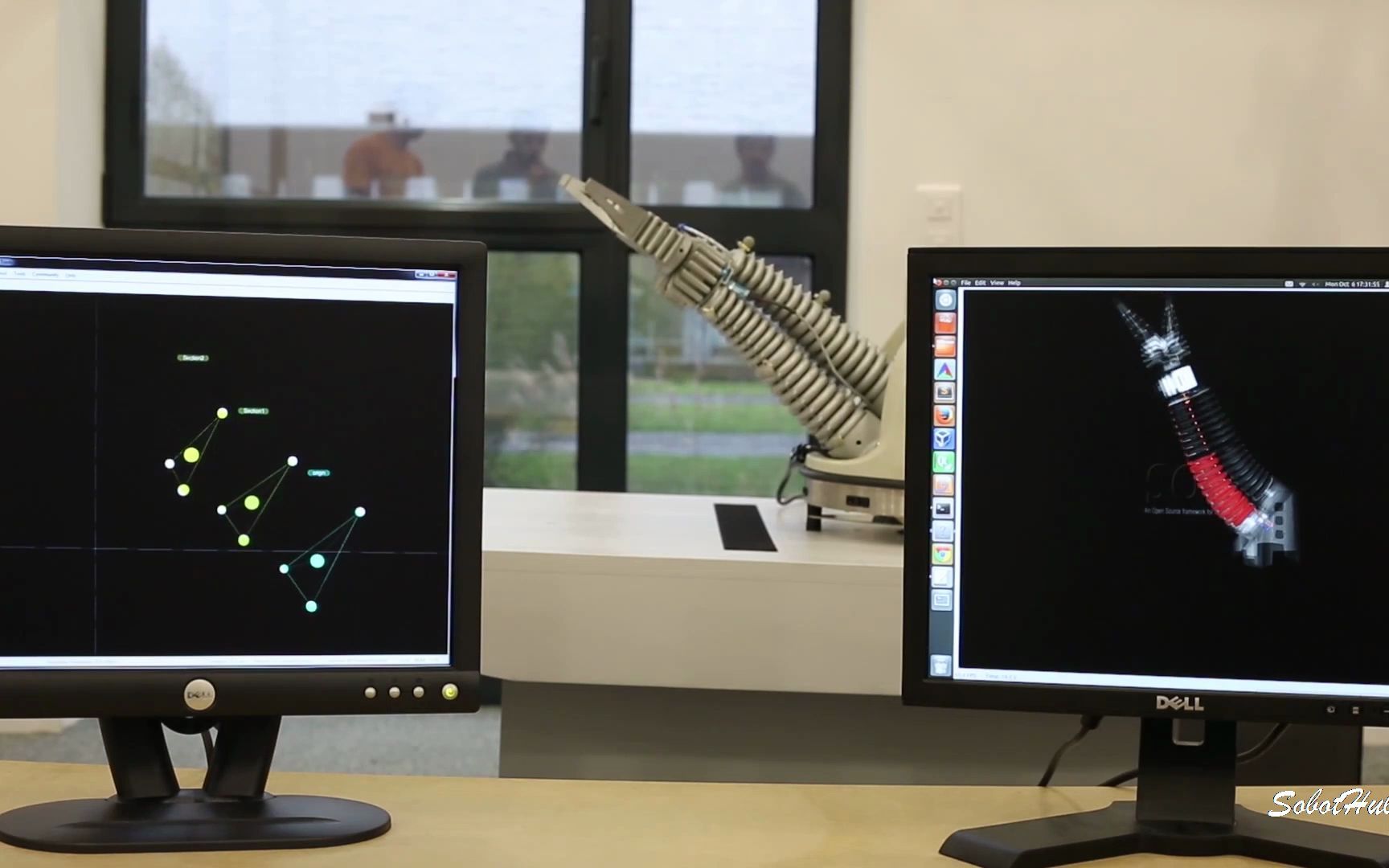
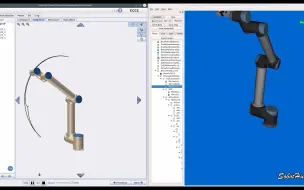
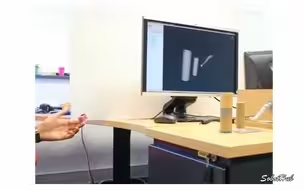
具有刚性椎骨的连续机器人有限元准静态建模和控制的域分解方法
发布人
这是我们组首次使用有限元方法对带有刚性椎骨的连续体机器人建模并实施准静态控制(控制其以缓慢速度移动,可以忽略其动力学影响)。该工作发表在2015年机器人顶会ICRA:https://www.researchgate.net/publication/282826106_Domain_decomposition_approach_for_FEM_quasistatic_modeling_and_control_of_Continuum_Robots_with_rigid_vertebras BTW 这个机器人
打开封面
下载高清视频
观看高清视频
视频下载器
#我们组的连续体机器人#
使用有限元方法仿真对软体机器人的运动建模和操纵控制
各向异性材料软体机器人的设计和模拟
基于有限元分析方法的连续体机器人的运动学和闭环控制
基于柔性脊柱的可变形机械手的设计实验与控制
SOFA Framework 软体机器人建模起步教程
Sofia步行机器人的有限元仿真与实验实现
使用SOFA Framework对软体机器人模拟的总体思路
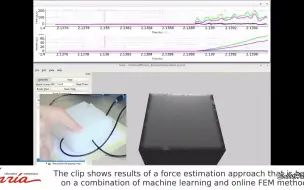
用于软机器人中的力和形状估计的基于有限元模型的传感器方法
用于机器人控制的逆实时有限元模拟:灵活的针头插入可变形组织
基于有限元模型的蛇形机器人轨迹追踪控制
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
SOFA Framework与Matlab交互模拟(基于有限元方法控制器设计)
基于实时有限元法的弹性软机器人控制(我们课题组元老之作)
人工耳蜗手术的有限元方法数值模拟
SOFA Framework和ROS的连接使用
在有限元方法框架下基于视觉感知作用在软机器人上的所受外力
SOFA Framework和Unity3D的结合
在SOFA Framework中训练神经网络以控制软体三脚架平台
SOFA Framework 软体机器人模拟器 Demo 1
软体机器人基于模型控制处理接触问题(模型实时控制)
浙江工业大学INNO-MATCH EXPO参展产品
模拟基于气流测量的新型软机械传感器
基于有限元分析对软体机器人进行几何形状优化
基于有限元分析建模和优化框架下的处理软体机器人接触问题
使用SOFA Framework模拟哈佛多步态软体机器人
软体抓手的自动协同设计和抓取控制策略
软体蛇形机器人的有限元建模增益调度控制
基于cosserat模型的滚动时域估计和模型估计控制
我S后,妻子把仿生机器人当成我 我死后的第三年陪在妻子身边的仍旧是那具和我外观一模一样的仿生机器人可妻子却没有察觉任何不对
这么多台仿生机器人电机齐刷刷的对话还不错
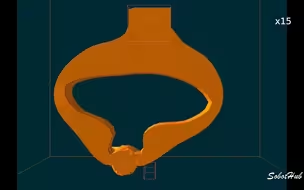
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
一些精妙的 Origami 折纸结构
A股大涨?机器人劝你要冷静…
柔顺机构学 Lecture 1 Part 1
软体蛇形机器人概念设计性的人机交互尝试
#你看过软体机器人玩迷宫游戏么#
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):纺织硅胶混合传感器教程(Textile Silicone Hybrid Sensor)
自动识别功能的仿生人形机器人
当魔术遇上软体机器人会发生什么?