V
主页
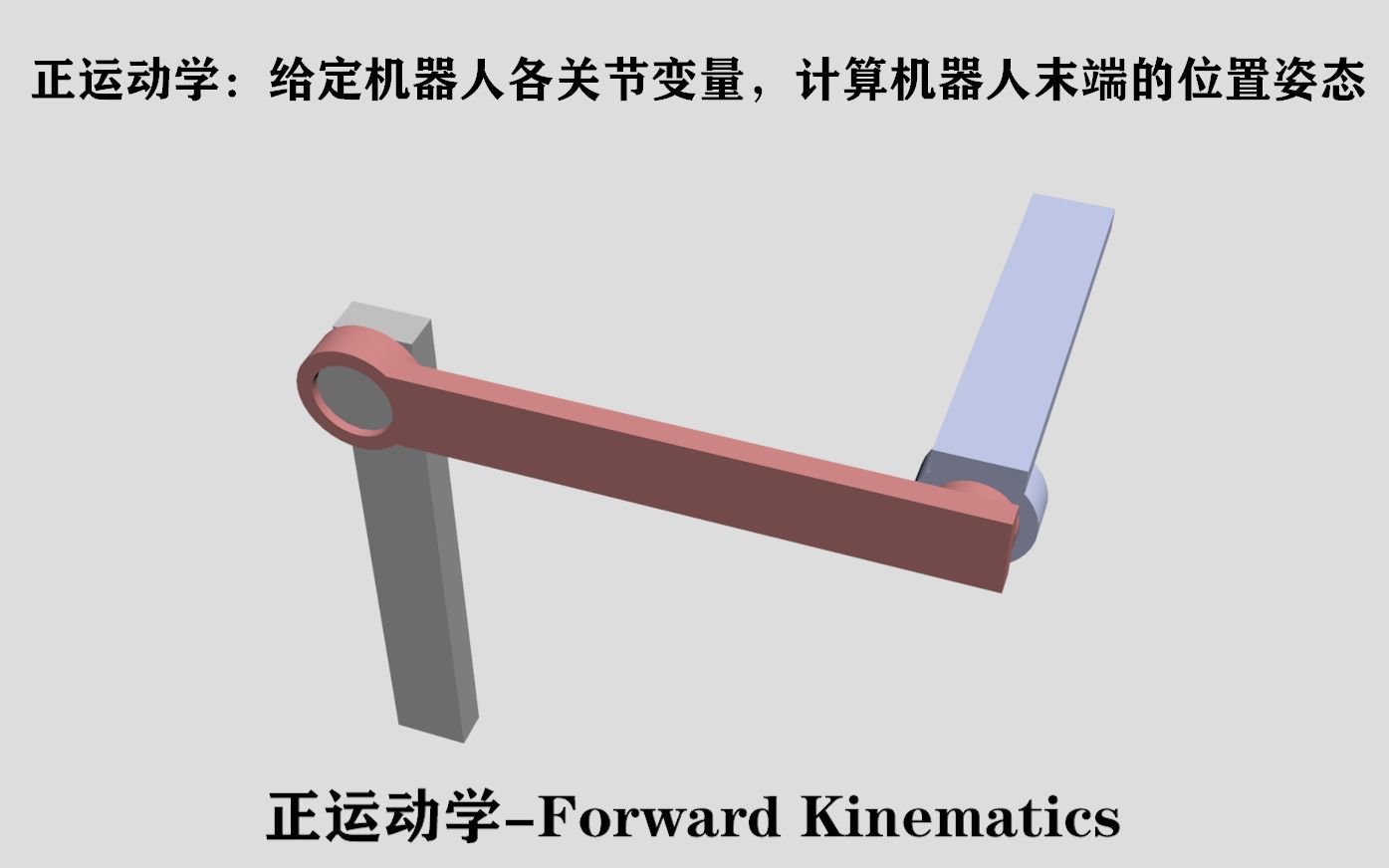
三分钟学习:四足机器人正运动学、逆运动学、齐次坐标、变换矩阵的概念
发布人
有想说的可以在评论区留言,会看~ 有收获的小伙伴可以点个关注+三连,谢谢~
打开封面
下载高清视频
观看高清视频
视频下载器
两分钟学习:四足机器人DH参数法
一分半学习:四足机器人关节、连杆、自由度
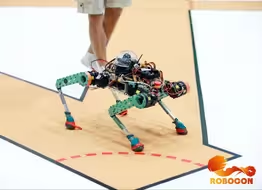
【2024 ROBOCON】仿生四足竞速-唯一一只倒着走的狗狗
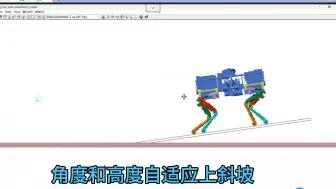
四足机器人MPC爬坡
我是山里灵活的狗!!!
一个手势告诉你什么叫设计。
【3D】真女人体!zbrush大胸女性人体建模雕刻 教你自己女朋友!zbrush女性人物角色模型制作教程!
DeeperMimic:(基于实时动画的)四足机器人多技能控制
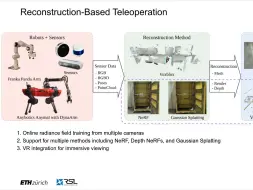
ETH | Anymal 机器人远程操作的辐射场
(RSS'24) HOV-SG:基于语言的机器人导航的分层开放词汇 3D 场景图
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
看网课,毁了很多人的高中。三大雷区踩了一个,都会前功尽弃
Wolfie 四足机器人 身体运动学演示 #机器狗DIY
软工和计科之间没有对比就没有伤害!大三才知道的我有点晚了啊...
复杂地形步态切换仿真
玩才能让您改善身弱!
意大利捡烟头的机器狗VERO | 要捡光地球上的4万亿颗烟头 | 机器人 | 四足机器人 | 机器狗 | 智能机器人 | 人工智能机
学习记录2:四足机器人MPC控制MATLAB计算仿真
【全471集】清华大佬终于把高中物理做成动画片了,学完变学霸!拿走不谢,这还行不会这没办法了!
早上好呀
Nature 智能机器'24-7-封面,使用强化学习和生成预训练AI模型,举一反三,实现四足机器人逼真的敏捷性和游戏性!
外国人常说的“people person”到底是什么意思?
想象一下这个画面,你的学习瘾将会达到最大
一体化关节模组长啥样,今天给大家实际展示。今天向大家展示我们关节模组的实拍视频,这是我们的行星和谐波减速器的关节,其中这款谐波的关节已经柔顺运转了一天
学习人像引导,一定不是去记所谓的美姿。
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
五分钟学习:单连杆摆动在Adams和matlab联合仿真
杭州云深处科技AI Robot Dog Chat | LLM VLM VLA
吹爆!【解决90%深度学习问题!】牛津大学博士、训练了世界上最大的人工神经网络,耗时三年撰写的深度学习图解书籍
【2024ROBOCON】仿生足式挑战赛国二——比赛回顾(后附彩蛋)
广勾股定理?我真没了解过……有点小尴尬……
这是一条寻求RL+robots合作的视频!
高中生怎样心无旁骛的学习,你学2小时大于别人学7小时!
六足机器人小小爆单,她来救场了,终于找到了女朋友的用处!
仿生机器人:我们离真正的人工生命还有多远?
Go2使用教学15-3D 激光建图
19年做的四足机器人,准备再把机器视觉和gpt加进去
全球最强轮腿机器狗 宇树 Go2 | 中国机器狗 傲视全球 | 四足机器人 还有谁是宇树科技的对手 | 波士顿动力 | 轮腿机器人 | 中国机器人 | 具身智能
专科计算机和本科计算机的差别,一针见血......
给跪了!放假在家自律上瘾后我开始疯狂逆袭!顶级自律上瘾学习方法,学8小时=别人学24小时🔥