V
主页
京东 11.11 红包
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
发布人
https://www.youtube.com/shorts/H4_EsrevPn0 国内天天锣鼓喧天 天天大跃进,我以为以为把BD 锤四了
打开封面
下载高清视频
观看高清视频
视频下载器
独家首映!Ai国产剧情《花木兰带村民养殖异形发家致富》,第二集|初遇异形,替父从军
全自动史诗级旋转爆炸Neuro
【登长城 逐旷野】
赛博狗子 机械飞升 Bio-inspired Musculoskeletal Soft Quadruped Robot
事实证明,机器人要跑得快还要穿鞋?
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
MuJoCo 仿真 案例欣赏
Ghost Robotics 爬楼梯 不错哟
这下真狗了 Boston Dynamics
用于人形机器人导航的 3D 多边形建图
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
清华教授刘嘉谈中美AI差距:可怕的是我们落后速度在加快
人形机器人足底机械结构设计
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
通过优化理论指导设计双足以达到控制和任务的最优
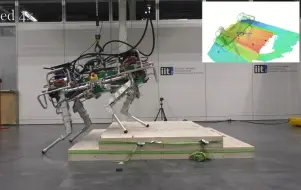
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
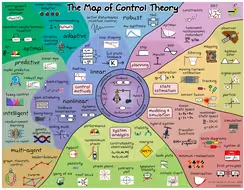
控制理论学习路线图
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
MIT Mini-Cheetahs looking for a new home
燃气热水器?算法牛哇!控制狂喜!!!
Online trajectory optimization for dynamic aerial motions of a quadruped robot
autonomous path planning over curved uneven path
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
Bipedal Safe Navigation over Uncertain Rough Terrain
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
人形机器人火爆发展:2025即将量产!
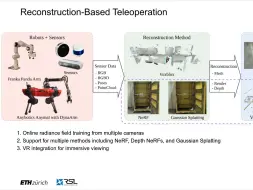
ETH | Anymal 机器人远程操作的辐射场
腾讯公布最新机器人研究进展,2030年我国人形机器人规模或达8700亿
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
基于分层优化的四足机器人全身运动控制搬运重物
DTC: Deep Tracking Control 2
ghost robotics 四足机器人
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks