V
主页
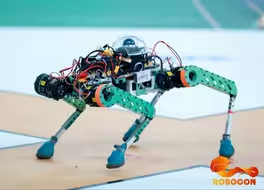
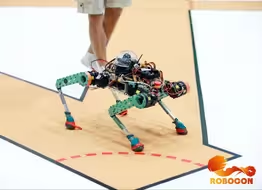
DeeperMimic:(基于实时动画的)四足机器人多技能控制
发布人
博士期间最后一篇论文终于正式见刊了。 论文以DeepMimic为基础,提出了一种通过模仿学习,以参考轨迹为输入,实现多技能运动的方法。论文本身只针对四足,但是博士论文大修期间扩展了一个人形的仿真demo。由于毕业时间很极限,硬件调的非常烂,相似的idea, Li Zhongyu 在 Cassie 上调的非常好。 Shao, Y., Jin, Y., Huang, Z. et al. A learning-based control pipeline for generic motor skills for quadruped robots. J. Zhejiang Univ. Sci. A25, 443–454 (2024). DOI: 10.1631/jzus.A2300128 Performing diverse motor skills with a universal controller has been a longstanding challenge for legged robots. While motion imitation-based reinforcement learning (RL) has shown remarkable performance in reproducing designed motor skills, the trained controller is only suitable for one specific type of motion. motion synthesis has been well developed to generate a variety of different motions for character animation, but those motions only contain kinematic information and cannot be used for control. In this study, we introduce a control pipeline combining motion synthesis and motion imitation-based RL for generic motor skills. We design an animation state machine to synthesize motion from various sources and feed the generated kinematic reference trajectory to the RL controller as part of the input. With the proposed method, we show that a single policy is able to learn various motor skills simultaneously. Further, we notice the ability of the policy to uncover the correlations lurking behind the reference motions to improve control performance. We analyze this ability based on the predictability of the reference trajectory and use the quantified measurements to optimize the design of the controller. To demonstrate the effectiveness of our method, we deploy the trained policy on hardware and, with a single control policy, the quadruped robot can perform various learned skills, including automatic gait transitions, high kick, and forward jump.
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
【2024 ROBOCON】仿生四足竞速-唯一一只倒着走的狗狗
复杂地形步态切换仿真
日本餐厅已经被中国深圳的送餐机器人成功攻占:究竟是怎么做到的?中英日三语采访(中日双语)(24/03/30)
卡斯阿姨被大白机器人奖励了三天三夜,彻底沦陷
人形机器人大踏步奔跑
大部分打工人最终的结局,早已注定
我是山里灵活的狗!!!
意大利捡烟头的机器狗VERO | 要捡光地球上的4万亿颗烟头 | 机器人 | 四足机器人 | 机器狗 | 智能机器人 | 人工智能机
大族机械臂SDK运动控制
这才叫科幻战争短片!战斗篇幅100%,全是外星机甲打仗【科幻Fans 布玛】动画剧《Obsolete》第1-2集
cassie快乐空翻
[ICRA2022] Learning Free Gait Transition via Phase-Guided Controller
中國AI機器人仿生「微表情」🤖機械狗首現軍演❗️Made By China YYDS
"赛博吗喽"? 机器狗变成猴了!
业界巨大突破:尸体机器人 | 尸体也能制成机器人 | 最强战场兵器!
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
WAIC 宇树科技四足机器人 世界人工智能大会 上海
声波的机器狗登场!被改造的霸天虎!7000字【彻底了解机器狗】变形金刚 超能勇士 猛兽侠
中型总线PLC支持EtherCAT、EtherNET、CANOPEN等多个现场总线
《高阶会员专属-第59期》工业运动控制教程:如何产生运动控制轨迹?何谓S形速度曲线与插补运动?
日式机甲动画仅存的硕果 高达 它究竟成功在哪
人工和机器的完美合作,大量生产校服和T恤。制衣业不可能实现机器人化,人手的灵巧性无可替代!
Learning Free Gait Transition for Quadruped Robots via Phase-Guided Controller
训狗_2
中国机器狗有多强?扛枪赛博汪汪队,开启狗海战术新篇章
宇树狗儿 动作舞蹈
宇树狗儿 倒立?
这是一条寻求RL+robots合作的视频!
新品小型脉冲PLC,两路485通讯,可扩展多个锐特IO模块,节省大空间!
松延动力 WAIC 2024 Live Demo
搞机器人自动化就是要盯着上市公司的非主营业务抢,上市公司能看得上的业务竞争至少不会那么惨…
智能车可能就是遗憾吧,最后发一个校内无直道加速4米的车吧
codesys虚拟轴双轴位置同步控制
伺服电机的控制参数如何影响动态响应
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
【强化学习入门到实战】这也太全了!Q-learning算法、DQN算法、PPO算法、A3C算法等强化学习核心算法一口气学完!_AI/人工智能/深度学习/强化学习
四足机器人MPC爬坡
Go2使用教学15-3D 激光建图