V
主页
运动规划之Octo map
发布人
感兴趣的同学可以点击下方链接添加工作人员,领取海量人工智能资源,还有相关行业交流群哦 https://www.shenlanxueyuan.com/launch/B0186/detail
打开封面
下载高清视频
观看高清视频
视频下载器
移动机器人运动规划
【Python】冗余机械臂——逆运动学
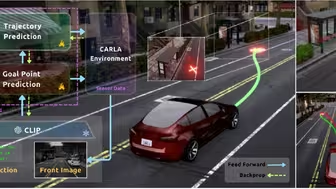
轨迹预测会不会被端到端干掉?Path-based的轨迹预测还有未来么?
日本大学生组团到上海体验自动驾驶和无人机配送,学生:很厉害很惊讶
视觉导航:从状态估计到运动规划
【Python】振动抑制——改进输入整形
《智能网联汽车》暑期实训研学营精彩回顾
端到端基础!从原始传感器数据到控制策略
跨域无人军团出征 清华 | LVCP 无需精确先验,基于密切集成 的协同实时相对定位
【开源】低成本DIY自动驾驶小车
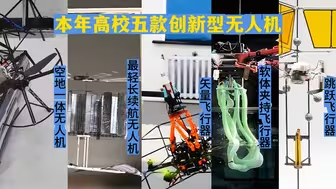
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
无人机集群的去中心化和分布式状态估计和协同定位与建图-徐浩/香港科技大学博士
StreamPETR—作分享:稀疏向量化表征长时序建模
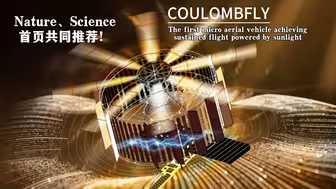
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
ECCV'24 | 无图定位新突破!从低精地图到使用全景-BEV联合检索网络进行跨视图图像地理定位。
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
视觉SLAMVIO开源代码解析-DSO
自动驾驶主流感知范式:BEV
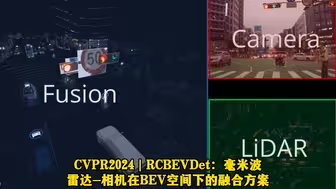
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
高翔SLAM报告:开阔高动态区域的激光融合定位
多传感器融合感知
融合人与环境的激光雷达三维动态场景感知 | 王程
看完特斯拉AI团队公布的最新自动驾驶发展蓝图,真的太震撼了!必须跟大家分享一下
自主旋翼无人机导论
L4自动驾驶技术首次赋能家用车,全球唯二、中国唯一的纯视觉高阶智驾系统!
朝韩必有一战,不是中国想不想控场的问题
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
浙江大学邹俊/唐威 Science子刊封面:仿生:利用仿生学设计的自适应软体一体化夹持器实现强大的无人机操作能力
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
通过五件事直击AI行业热度!教育职场齐发力势不可挡, 学习AI已然成为新常态!
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
FSD 纯视觉大暴雨照样随便高速随便开。请问某激光雷达的车为什么这种雨反而要退出呢?#特斯拉 #自动驾驶 #人工智能 #特斯拉自动驾驶 #FSDV12
AR光波导的应用与发展 | 郑昱
RSS'2024 | MPCC++:升级无人驾驶安全盾牌,首次在现实中达到100%防撞率
自制ros建图导航机器人2
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
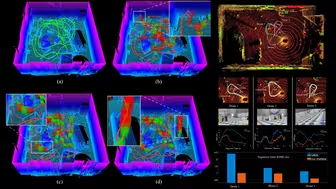
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
超简单画图实现自动化脚本,支持yolo识别ai级