V
主页
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
发布人
机器人顶级期刊RA-L 2023年Best Paper授予香港科技大学与中山大学研究团队的论文:H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation。该论文提出了一种名为H2-Mapping的实时稠密建图的新方法,该方法基于NeRF建图,即使在边缘计算设备上也能实现更高质量的重建和实时性能。。。。。。
打开封面
下载高清视频
观看高清视频
视频下载器
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
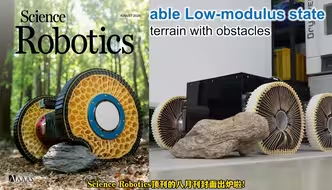
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
基于3D高斯渲染技术的高速稠密建图:SplaTAM
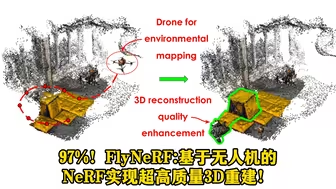
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
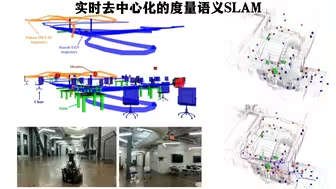
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
ECCV'24 | OpenIns3D:无需2D图像的3D场景理解技术,随意处理复杂推理和文本查询
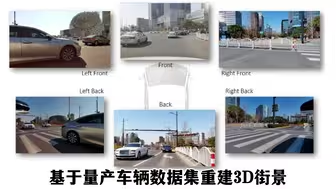
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
全新的3D编辑算法 —— GaussianEditor, 高效快速实现3D场景增删改!
鲁鹏老师精心打磨的NeRF基础与常见算法解析课程小节:神经网络与位置编码
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇
基于神经辐射场的实时稀疏视觉里程计NeRF-VO
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
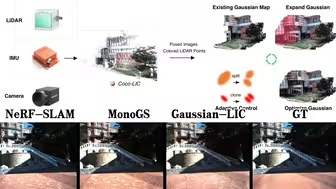
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
大疆DJI Neo无人机抢先曝光:23GB 内置存储、135 克、1/2 英寸传感器,199 美元
【穿越机】十寸穿越机飞玉龙雪山
AI又进化?能实时捕捉表情换脸了?!!
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
ASMR助眠|维修报废的老式机器人🤖
博简科学:这么逼真的“人”,你敢触碰吗?
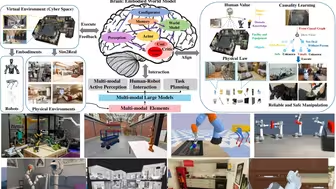
鹏城实验室、中山大学 | 深度调研解析将近400篇文献,首篇多模态大模型时代的具身智能【综述】重磅推出
大疆Neo avata mini 要来了,大疆新品#大疆neo #大疆新品
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
Science Robotics封面 | 当机器人学会用'快照'导航, 轻重量小内存实现'长途跋涉'
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
宇树G1机器人VS波士顿Atlas机器人,你觉得哪一个设计的相对更完美呢?
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
果蝇无人机?用翅膀飞起来的无人机来了!
ISMAR 2020【最佳论文】商汤提出手机端实时单目三维重建系统!
08CaptureModeler导入XML三维建模
小男孩被改造成了机械人大姐姐
移动机器人运动规划的地图表示&基础知识
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统