V
主页
StreamPETR—作分享:稀疏向量化表征长时序建模
发布人
学习人工智能与自动化,机器人就在深蓝学院
打开封面
下载高清视频
观看高清视频
视频下载器
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
自动驾驶规划控制概况
ECCV'24 oral | DVLO,首个基于深度聚类的多模态融合,双向结构对齐的融合网络新SOTA
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
BEVFormer一作分享,基于时空融合的BEV感知”
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
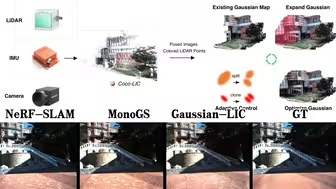
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
多模态信息感知的SLAM | 吴毅红
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
大模型时代下的端到端自动驾驶(上篇)
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
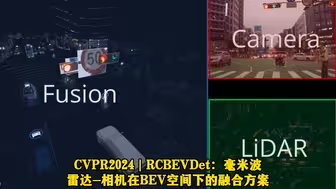
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
YOLO版本再升级 !YOLOv10:优化架构与无NMS训练提升实时目标检测效率
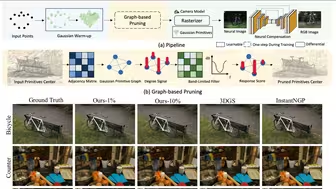
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
自动驾驶主流感知范式:BEV
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
MOT-CUP: 具有共形不确定性传播的 协同多目标跟踪,利用来自COD的不确定性量化以增强MOT性能
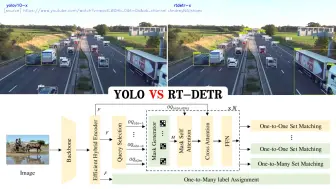
百度重磅推出RT-DETRv3,挑战所有RT-DERT与YOLO系列,实现目标检测的极速与精准
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
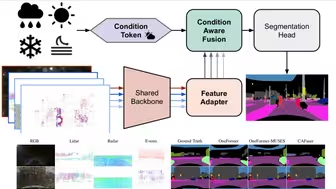
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
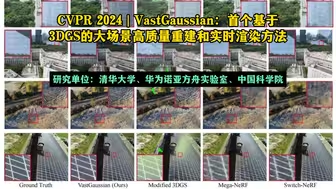
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
ECCV'24 | 无图定位新突破!从低精地图到使用全景-BEV联合检索网络进行跨视图图像地理定位。
移动机器人运动规划
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
基于三维点云场景的语义及实例分割
首篇统一户外+室内3D检测框架推出,CVPR2024 | UniMODE:统一单目3D物体检测
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
VIO主流框架&VINS推导解析
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
👋Arc浏览器的告别与新起点丨终章丨完结丨新产品ing
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通