V
主页
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
视觉SLAM开源代码论文带读(ORB_SLAM2)
多传感器融合感知
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
视觉导航:从状态估计到运动规划
2021 高翔:视觉SLAM基础
自动驾驶规划控制概况
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
MATLAB与ANSYS Workbench联合仿真专题教程 试看章节09-实战2-脚手架SpaceClaim脚本建模
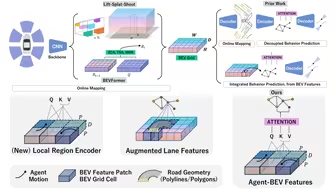
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
面向自动驾驶应用的激光雷达地点识别-马君驿/弗赖堡大学博士生
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
Waymo研发经理|自动驾驶感知前沿技术介绍
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
视觉SLAM开源代码论文带读(DSO)
BEVFormer一作分享,基于时空融合的BEV感知”
视觉SLAMVIO开源代码解析-DSO
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
端-云协同的视觉定位与重建及应用 | 章国锋
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
高翔SLAM报告:开阔高动态区域的激光融合定位
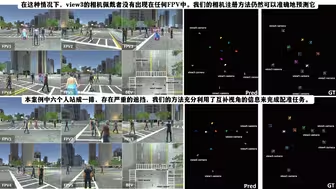
CVPR'24 | BEVSee: 无需相机校准的联合相机 和拍摄对象配准
自驾人受益匪浅!Apollo核心讲解之Cyber RT
PETR—作分享:基于位置编码的BEV感知范式
【CVPR2023】VIO 初始化探究:旋转平移解耦的高效鲁棒初始化
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
深度学习与视觉SLAM
自动驾驶规划算法岗高频面试题详解
AR光波导的应用与发展 | 郑昱
【直播精彩回顾】算法工程师求职沙龙--移动机器人&无人驾驶专场
【免费公开课】语义信息增强的激光雷达SLAM
深蓝自动驾驶套件测试Apollo 6.0
第三届全国SLAM技术论坛 | 开幕致辞
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
Visual-Inertial Systems: Sensing,Estimation, Perception and Navigation | 黄国权
算法原理与代码实践融合讲解的NeRF精品课程:NeRF基础概述
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!