V
主页
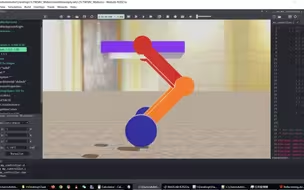
双足轮机器人自由式飞坡合辑——C语言Webots仿真轮腿式双轮足机器人花式飞坡(WLHR, Wheel-Leged Hybrid Robot)
发布人
双足轮机器人自由式飞坡——C语言Webots仿真轮腿式机器人花式飞坡(WLHR, Wheel-Leged Hybrid Robot)。依旧使用Windows Webots自带编译环境及裸C实现控制,所见即所得。 依旧使用拉格朗日动力学建模(不简化作倒立摆),MATLAB符号运算验证数学推导,LQR全状态反馈控制。此Demo对于初学者掌握拉格朗日法动力学建模、MATLAB符号运算、LQR控制算法和Webots C语言控制仿真有全面性帮助;LQR控制器即线性二次型调节器(LQR, Linear Quadratic Regulator) #双足轮 #自由式飞坡 #花式飞坡 #Webots #LQR #拉格朗日方程 #动力学建模 #C语言 #MATLAB #控制算法
打开封面
下载高清视频
观看高清视频
视频下载器
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
Webots仿真ABB多关节并联结构工业机器人
Handle Robot ?
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
Webots仿真SolidWorks模型导入仿真
七级倒立摆LQR控制——Webots仿真C语言控制七阶倒立摆(Seven-Link Inverted Pendulum System)
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
三级倒立摆LQR控制——C语言Webots仿真三阶倒立摆(TIPS, Triple Inverted Pendulum System on a Cart)
Webots倒立摆NMPC起摆控制C语言实现——SQP序列二次规划于非线性模型预测控制倒立摆SwingUp
Cubli单点平衡方块单点站立立方体Webots C语言控制仿真
Webots RMUC 场地环境仿真(RMUC, RoboMaster University Championship)
Webots 仿真 单桨单摆控制系统
Webots倒立摆MPC控制——C语言模型预测控制二次规划QP算法 Model Predictive Control Quadratic Programming
Point-Foot Bipedal Robot Based on Reaction Wheel and Closed-Chain Four-Link Leg
Webots二级倒立摆LQR控制系统仿真(DIPC, Double Inverted Pendulum on a Cart)
C实现MPC模型预测控制二次规划QP算法应用于倒立摆Webots仿真Model Predictive Control Quadratic Programming
Webots下肢二连杆的反演控制——C语言实现Backstepping反步控制
Webots 仿真一维动量倒立摆 Cubli 控制系统
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
In-Wheel Motor Controller
Bipedal Robot Locomotion System
IEEE RAM 欠驱动机器人控制算法评估的双摆机器人开源平台——查尔姆斯理工大学Shivesh Kumar
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation
matlab软件安装完 打开证书报错error-8 教程解决篇#matlab #matlab软件 #matlab安装 #matlab学习 #matlab报错
【机械狗五连杆丨MATLAB】运动学逆解
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
MATLAB2024 B下载安装教程(附matlab 安装包下载链接,评论区自取)matlab最新版(9月份刚出的,matlab激活,matlab2024最新
六级倒立摆LQR控制——C语言Webots仿真六阶倒立摆(Six-Link Inverted Pendulum System)
F4 Actuator Stage III: Torque Control Test
DrvH7 for Motor-91 Achieve 11 Nm (no-reducer) and 7162 rpm (non-load)
Bipedal Wheel-Legged Robot with Direct-Drive Wheel: Design and Experiments
C代码NMPC倒立摆起摆控制Webots仿真——非线性模型预测控制及序列二次规划SQP应用
2017年全国大学生电子设计竞赛
Webots仿真Cubli一维动量倒立摆控制系统
H723 Actuator Stage III: Torque Control Capacity Test
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (RMD X8-Pro1:9)