V
主页
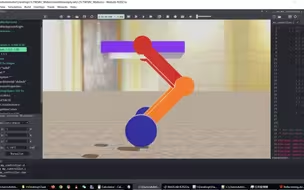
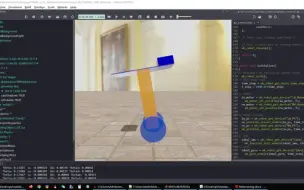
Webots仿真Cubli一维动量倒立摆控制系统
发布人
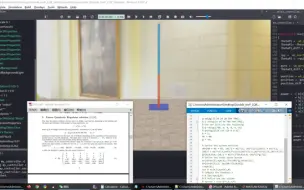
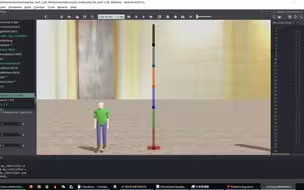
Webots仿真Cubli一维动量倒立摆控制系统 依旧使用Windows Webots自带编译环境及裸C实现控制,无库依赖或集成软件包平台等,所见即所得。 倒立三角、莱洛三角、倒立轮摆、平衡三角、反作用轮、惯性轮摆、动量轮摆、平衡单车……惯性轮摆是第一个单输入两自由度微分平坦欠驱动机械系统的实例。其控制目标是通过驱动反作用轮使整体稳定到上平衡点,同时转轮达到指定转速。对于初学者入门PID控制算法及其C语言实现和Webots控制仿真有全面性帮助;使用了InertialUnit、Gyro、RotationalMotor、PositionSensor、Keyboard、AnsiConsole等节点及API函数。
打开封面
下载高清视频
观看高清视频
视频下载器
双足轮机器人LQR控制——C语言Webots仿真轮腿式双轮足机器人(WLHR, Wheel-Leged Hybrid Robot)双足双轮双足
Webots 仿真一维动量倒立摆 Cubli 控制系统
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
Webots仿真SolidWorks模型导入仿真
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
七级倒立摆LQR控制——Webots仿真C语言控制七阶倒立摆(Seven-Link Inverted Pendulum System)
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
三级倒立摆LQR控制——C语言Webots仿真三阶倒立摆(TIPS, Triple Inverted Pendulum System on a Cart)
C实现MPC模型预测控制二次规划QP算法应用于倒立摆Webots仿真Model Predictive Control Quadratic Programming
Handle Robot ?
【C语言】使用控制台播放「使一颗心免于哀伤」
基于STM32H723的一维动量倒立摆Cubli控制系统
Webots仿真ABB多关节并联结构工业机器人
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
C语言编程:玫瑰花(150行代码)
C代码NMPC倒立摆起摆控制Webots仿真——非线性模型预测控制及序列二次规划SQP应用
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
Webots倒立摆NMPC起摆控制C语言实现——SQP序列二次规划于非线性模型预测控制倒立摆SwingUp
三菱放卷,用pid调节 伺服控制
Cubli单点平衡方块单点站立立方体Webots C语言控制仿真
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
有个说法:“「递归」是检验编程天赋的试金石”;而本视频打破天赋壁垒,助你快速掌握递归。
Bipedal Robot Locomotion System
Webots 仿真 单桨单摆控制系统
学生管理系统
scanf()坏事做尽!
【元气骑士前传】暴打你的马
Advanced Universal Motor Controller DrvH7: Precision Torque & High Speed
Position Torque Servo Test
嵌入式C语言高阶版
控制理论基础 - 第19-20课时 - 系统的串联校正-为什么要做校正,超前校正、滞后校正、超前-滞后校正到底应该如何设计?PID与积分-超前滞后校正的相似性
Webots二级倒立摆LQR控制系统仿真(DIPC, Double Inverted Pendulum on a Cart)
六级倒立摆LQR控制——C语言Webots仿真六阶倒立摆(Six-Link Inverted Pendulum System)
穿越机抖动调了半天PID没用,排查装机总算解决了,享受澎湃动力//1s 65圈机
电控组第一次培训
【C语言】typedef!?活爹啊!
暖通空调自控编程,送风机变频器接线与频率控制程序详解
【C语言入门必刷】整整100道经典习题,3天刷完这些题,你的C语言就牛了!(考前突击/计算机二级 /强化训练 /作业练习)