V
主页
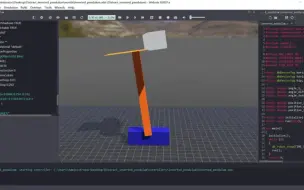
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法
发布人
Webots二级倒立摆MPC控制——C语言实现二次规划QP算法及MPC模型预测控制算法 依旧使用Windows Webots自带编译环境及裸C实现控制,无库依赖或集成软件包平台等,所见即所得。 二级倒立摆(DIPC, Double Inverted Pendulum on a Cart)。 离散时间状态空间模型预测控制(DSSMPC, Discrete-time State Space Model Predictive Control)。 优化理论之二次规划(QP, Quadratic Programming)。 二级倒立摆倒双摆系统是一个复杂非线性、强耦合、多变量的自然不稳定系统,它也是双足行走机器人、火箭飞行姿态控制等许多控制对象的最简单模型。此Demo对于初学者入门MPC控制算法二次规划QP算法及其C语言实现和Webots建模控制仿真有全面性帮助; #二级倒立摆 #MPC #QP #C语言 #Webots #模型预测控制 #二次规划 #Quadprog #优化理论 #倒立摆
打开封面
下载高清视频
观看高清视频
视频下载器
C语言二次规划QP算法及MPC模型预测控制算法应用于二级倒立摆Webots仿真模型
Webots倒立摆NMPC起摆控制C语言实现——SQP序列二次规划于非线性模型预测控制倒立摆SwingUp
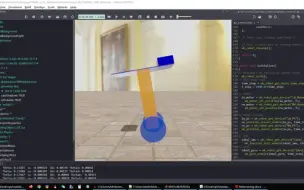
C实现MPC模型预测控制二次规划QP算法应用于倒立摆Webots仿真Model Predictive Control Quadratic Programming
Webots一阶直线倒立摆PID控制仿真(IPS, Inverted Pendulum System)
四级倒立摆LQR控制——C语言Webots仿真四阶倒立摆(Four-Link Inverted Pendulum System)
C代码NMPC倒立摆起摆控制Webots仿真——非线性模型预测控制及序列二次规划SQP应用
Webots仿真ABB多关节并联结构工业机器人
Webots二级倒立摆LQR控制系统仿真(DIPC, Double Inverted Pendulum on a Cart)
两轮平衡车LQR控制仿真——Webots C语言(TWSBV, Two-Wheeled Self-Balancing Vehicle)
Webots仿真Cubli一维动量倒立摆控制系统
【Python】人形机器人——模型预测控制
Cubli单点平衡方块单点站立立方体Webots C语言控制仿真
In-Wheel Motor Controller
Webots倒立摆MPC控制——C语言模型预测控制二次规划QP算法 Model Predictive Control Quadratic Programming
Webots仿真Scara机械臂运动仿真
Webots RMUC 场地环境仿真(RMUC, RoboMaster University Championship)
DrvH7 for Motor-91 Achieve 11 Nm (no-reducer) and 7162 rpm (non-load)
Webots 仿真一维动量倒立摆 Cubli 控制系统
【2024最新】超详细的Visual Studio 2022下载安装使用教程,手把手教你,包成功的,一键安装永久使用!
H723 Actuator Stage III: Torque Control Capacity Test
Webots下肢二连杆的反演控制——C语言实现Backstepping反步控制
Webots 仿真 单桨单摆控制系统
你买到过高铁上的15元盒饭吗?|people underline -《十五元盒饭》正式上线
Webots一阶直线倒立摆LQR控制仿真(IPS, Inverted Pendulum System)
简化平衡步兵LQR控制Webots仿真C语言——带平台的两轮平衡车
五级倒立摆LQR控制——C语言Webots仿真五阶倒立摆(Five-Link Inverted Pendulum System)
【51单片机Proteus仿真】0基础手把手教你实现流水灯
Actuator H723: Orthogonal Field-Oriented Control using Space Vector Modulation
Webots仿真SolidWorks模型导入仿真
【全700集】清华大佬终于把C语言教程做成了动画片,C语言零基础入门到精通全套教程,全程干货无废话草履虫都能学会!学完即就业!这还学不会,我退出b站!
【超多模型MPC算法】开源Mujoco-MPC演示
【最新版】Visual Studio 2022下载安装使用教程(附安装包)
Replaceable Modularized FOC Actuator H723 from Watson Dynamics (RMD X8-Pro1:9)
FOC动量飞轮倒立摆
双足轮机器人自由式飞坡合辑——C语言Webots仿真轮腿式双轮足机器人花式飞坡(WLHR, Wheel-Leged Hybrid Robot)
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
Advanced Universal Motor Controller DrvH7: Precision Torque & High Speed
【原创音乐】强行找乐子之MPC ONE
51单片机 自制躲射线小游戏≡ω≡
有个说法:“「递归」是检验编程天赋的试金石”;而本视频打破天赋壁垒,助你快速掌握递归。