V
主页
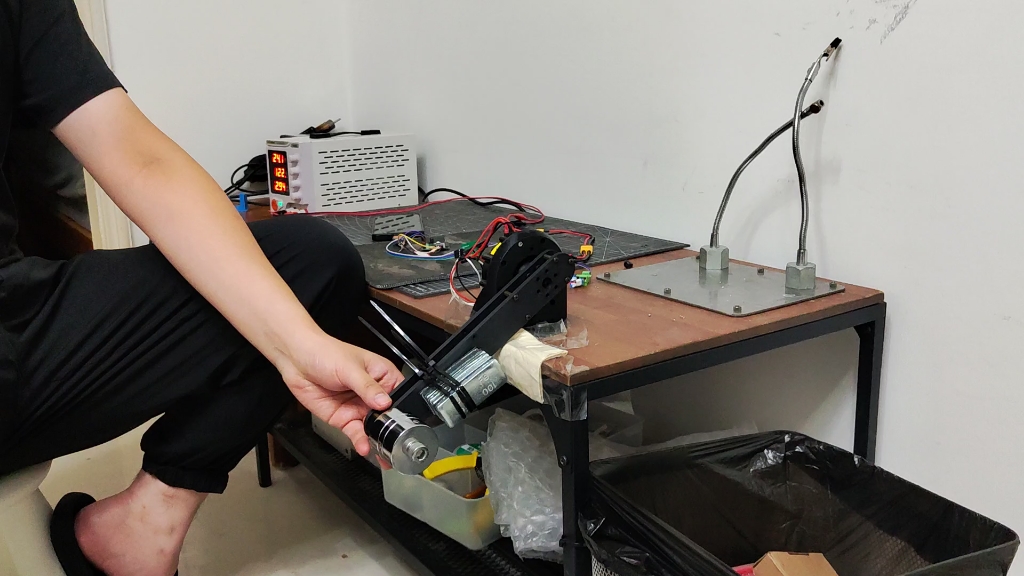
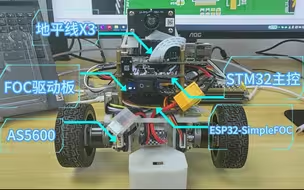
练习时长两年半的小米微电机重力补偿
发布人
打算从头做一台新的机械臂,先对小米电机的重力补偿测试
打开封面
下载高清视频
观看高清视频
视频下载器
花俩小时调的重力补偿和力反馈
只是补偿重力,但很柔!
小米电机小四轴cyberarm300拖动点示教MoveJ规划(力控在做了!)
重力补偿
小米微电机cybergear带载重复精度测试(测了个寂寞)
直流电机重力补偿
只是补偿重力,没啥技术含量
小米电机带载重复精度测试(重测)
一个不太行的重力补偿
完美重力补偿装置
重力补偿demo
自研小四轴机械臂cyberarm300重磅发布!
用小米电机整点活
补偿重力罢了,也没什么含金量
运动学控制结束,就不弄花里胡哨的轨迹了,拉根直线意思意思
FOC位置环->速度环->电流环三闭环控制
打胶老手开箱电机
foc速度闭环
【全网最详细】暴拆分析小米 CyberGear 机器人关节电机
国产刹车在这方面的努力未曾停止过
FOC电机同步控制
cyberarm300跳个最简单的舞
感谢本末科技赞助提供的电机!
又又搓了一台四轴机械臂
【自制】初步实现的机甲手臂控制效果
猫:FOC真好玩
集我目前所学的无刷平衡车
焊接接顺序不一样,也会导致结果不一样
小米人在传感器终于来了,电池版存在传感器,再也不用担心电源问题了~
刚能走。极度落后,勉强展示,勿喷[笑哭]
外骨骼膝,肘关节连杆设计
《自旋同时沿世界坐标前进2.0》
这是发生在我工大学弟身上的真实故事,大家严肃点,尽量别笑…
敲了一整夜代码,无感FOC方波高频注入终于成功了
暴力弱磁
七轴机械臂的运动学求解实机验证,2022年1月
玩穿越机的和玩摄影的都沉默了
刹车片极限测试
机器人:不能再进化了,再这么下去要去上班了
机器人群协同作业3