V
主页
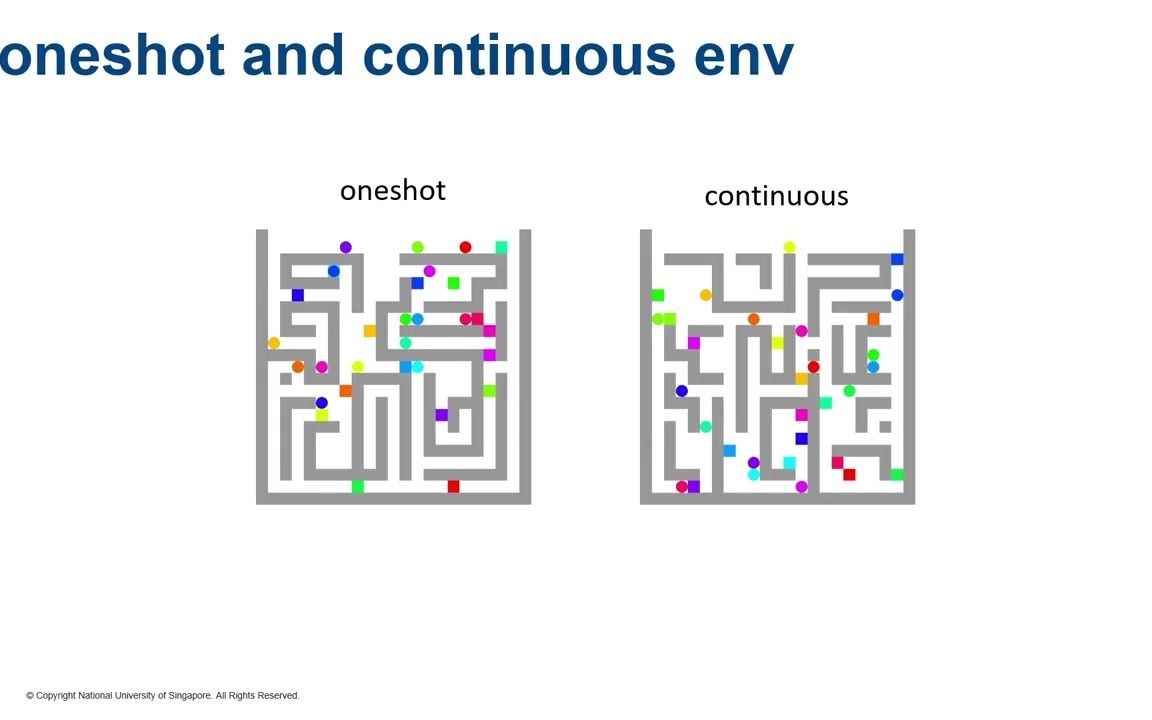
多智能体强化学习路径搜索——新加坡
发布人
https://www.youtube.com/watch?v=XYehKDz27ec 新加坡国立大学关于分布式RL+IL的新论文,用于大规模、仅局部交互的部分可观测多智能体路径规划MAPF。智能体一旦达到当前目标,就会不断地获得一个新的目标。开发了新的约定学习方法,扩展了每个agent的个体观察状态,并报告了与集中式规划器和以前的工作PRIMAL相比显著改进的性能。
打开封面
下载高清视频
观看高清视频
视频下载器
强化学习魅力时刻
第三组 路径规划算法(2024年)
听台湾将军说机器狗:打机器狗的方法实在太多了!#机器狗 #无人车 #于北辰#机器人
215:顶刊复现:多智能体有限时间分布式事件触发一致性控制
强化学习,启动!
【ChatGPT4.0手机版】国内无需魔法,无限次数使用教程来了!
拿神话当地契,那可是你说的喔!
多智能体强化学习中的协作研究——On Cooperation in Multi-Agent Reinforcement Learning
Diffusion Policy 结合 PPO 模仿+强化 (下)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
AI芯片由AI设计真形成闭环了强化学习驱动芯片设计
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
动画讲解深度强化学习(RL、Q-网络、策略优化、大模型算法入门教程)
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
python3.13效率暴涨!NO-GIL!Python高性能时代到来!附大规模路径搜索测试!
【大模型入门】手把手教你多智能体框架swarm:开源多Agent编排框架 Swarm(Swarm框架概述、安装与使用教程、应用场景)
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
【揭秘】五指灵巧手DexHand021 产线组装的秘密
【时延多智能体一致性】【事件触发】切换拓扑下非线性时间延迟多智能体的固定时间平均一致性: 基于事件的触发方法
6个智能体的编队导航与避障_补充实验
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
这应该是你能找到的讲解最系统全面的【强化学习】教程!北大出身王树森教授从零到一保姆式教学,小白也能很好懂!
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
【美军】多域作战动态推演--马赛克战和多域战的场景仿真
【西湖公开课】西湖博导赵世钰的强化学习免费课程来了
【Python】人形机器人——强化学习
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
RLChina 2024 | 3小时强化学习入门课程-上
测试行走站立切换和站立抗冲击
基于EFG法的机翼鸟撞模拟
[CoRL]使用模仿引导强化学习实现基于视觉的敏捷飞行 | 2024 苏黎世大学
强化小伙终于起立了
华科博士毕业博后去剑桥or新国立
【共享LLM前沿】直观理解大模型预训练和微调!P-Tuning微调、Lora-QLora、RLHF基于人类反馈的强化学习微调,代码讲解
局部同伦运动路径规划
外网热议:波士顿机器野猫 网友:这款割草机的设计非常奇怪
深度MARL自动驾驶-Deep Multi Agent Reinforcement Learning for Autonomous Driving
强强联合!GNN+强化学习!刷爆SOTA,霸榜顶会的28个方案
TITA强化学习迁移
沼泽小狗 机器狗 Ghost V60