V
主页
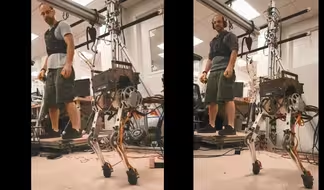
有开源github代码! RA-L论文 人形机器人的多接触全身控制
发布人
https://www.youtube.com/watch?v=RGkZS57_6Nk Multi-Contact Whole-Body Force Control for Position-Controlled Robots Abstract: Many humanoid and multi-legged robots are controlled in positions rather than in torques, which prevents direct control of contact forces, and hampers their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This letter introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, and proposes a unified formulation that exploits an explicit model of flexibility to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real time. Our pipeline is validated with experiments on the real, full-scale humanoid robot Talos in various multi-contact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces. https://hucebot.github.io/seiko_controller_website/ https://github.com/hucebot/seiko_controller_code https://ieeexplore.ieee.org/abstract/document/10517393
打开封面
下载高清视频
观看高清视频
视频下载器
通过优化理论指导设计双足以达到控制和任务的最优
宇树B2倒立行走
人形机器人足底机械结构设计
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
幽灵机器人 Ghost Robotics - Vision 60
人形机器人 手指机械结构
单腿站立 轻轻松松 Atlas KarateKid
真牛!这个人形机器人吊打很多厂家的“产品”
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
How to design nonlinear MPC with deep learning prediction model
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
Control is dead ?control+ learning才是未来
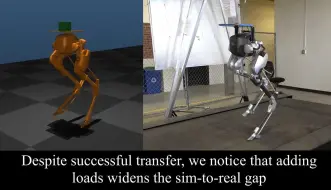
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
A Feasibility-Driven Approach to Control-Limited DDP
An Efficient and Versatile Framework for Multi-Contact Optimal Control
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
印度的四足机器人 看着还可以哦
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
(ICRA 2024) Actor-Critic Model Predictive Control
ghost robotics 四足机器人
人形机器人灵巧手臂最新成果
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
人形机器人盲上16cm楼梯仿真
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
呐, 这就叫优雅~
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
MIT Mini-Cheetahs looking for a new home
(RA-L 23) Reactive Landing Controller for Quadruped Robots
solving the walking robot problem with reinforcement learning
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Impact-Aware Bimanual Catching of Large-Momentum Objects
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning