V
主页
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
发布人
作为一种基于类神经形态机理的仿生视觉传感器,事件相机的工作原理不同于传统相机。 由于其各像素异步且独立的工作机制,事件相机具备低延迟、高时间分辨率、高动态响应等特点。这些优良特性为解决当前使用传统相机的机器人视觉感知、状态估计等任务中的一些瓶颈问题提供了可能。然而,事件相机的输出是近乎于连续的高频时间——空间数据流,无法直接兼容为传统相机开发的绝大部分算法,因此需要设计和开发全新的解决方案来释放事件相机的优良特性。 在这个报告中,我将围绕事件相机在SLAM技术中的应用展开。报告首先介绍事件相机的工作原理、传感器特性以及常见的应用场景,然后回顾过去十年内该领域的发展。在此基础上,着重介绍当下几个具有参考价值的系统级工作,并从方法论的高度讨论基于事件的方法需要解决的核心问题。 最后,分析当前该领域发展遇到的瓶颈,并预测未来几年一些值得关注的研究方向。
打开封面
下载高清视频
观看高清视频
视频下载器
AR与计算机视觉技术 | 吴克艰
Visual-Inertial Systems: Sensing,Estimation, Perception and Navigation | 黄国权
动态视觉与SLAM:在线学习的途径 | 査红彬
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
面向自主移动机器人的感知和规划前沿进展 | 刘勇
视觉SLAMVIO开源代码解析-DSO
StreamPETR—作分享:稀疏向量化表征长时序建模
高翔SLAM报告:开阔高动态区域的激光融合定位
【3D数学】欧拉角万向节死锁与插值
NeRF系列公开课03 | Multiplane Images and Neural Rendering
PETR—作分享:基于位置编码的BEV感知范式
《松灵ROS 2开讲啦》第六期 Nav2导航应用
【中英+笔记】对话《人类简史》作者尤瓦尔·赫拉利:人工智能将在2034年控制你|2024.09.05
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
【直播精彩回顾】算法工程师求职沙龙--移动机器人&无人驾驶专场
视觉SLAM算法入门必备基础知识
BEVFormer一作分享,基于时空融合的BEV感知”
【全网最新v4.9 SD教程】秋叶大神Stable Diffusion v4.9整合包! 零基础入门到精通全套SD教程,这可能是B站唯一能将SD讲明白的教程,
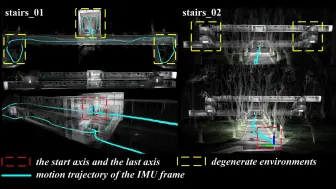
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
Google 前 CEO 埃里克·施密特在斯坦福2万字讲座实录:AI明年三大趋势,第一个趋势将彻底改变你获取信息的方式
搞SLAM算法为什么要学李群和李代数
【劝退】自学StableDiffusion能救一个是一个!这里面的水可深了!人工智能大佬专为零基础研制的StableDiffusion教学教程,太牛了!AI绘图
跨智能体模仿学习的机器人连续演化模型-刘星昱/卡内基梅隆大学博士后
【讲座】中国古代命理学 (王德峰 11讲)
SLAM中的位姿估计量为什么用转移矩阵T表示
10年后,依然没有人能够击败他的内容!
【论文解读】外网大佬解读NeRF神经辐射场原理
地表最强AI写代码工具——Cursor:人人都是P8程序员
Generic and Generalizable Manipulation Skill Benchmarking and Learning
讲座回放丨“读懂艺术史”之西方美术史第5讲(主讲人:陈衔)
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
面向移动机器人的道路环境感知-范睿/同济大学教授
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
白先勇在北京大学讲青春版《牡丹亭》西游记
激光slam相对坐标精度,科力达slam车库室内操作
NeRF系列公开课06 | 高动态范围神经辐射场—HDR-NeRF
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L2 sec1 CARLA 安装
MIT Robotics-Tactile Sensing for Robots with Haptic Intelligence 具有触觉智能的机器人的触觉传感
反派机械少女军团战败